In diesem Blog stelle ich meine Windows-App USB2PPM4CompuFly für den CompuFly USBtoPPM Converter V2.0 von Flytron vor. Diese Software ersetzt das auf der Flytron Produktseite bereit gestellte CompuFly – Programm.
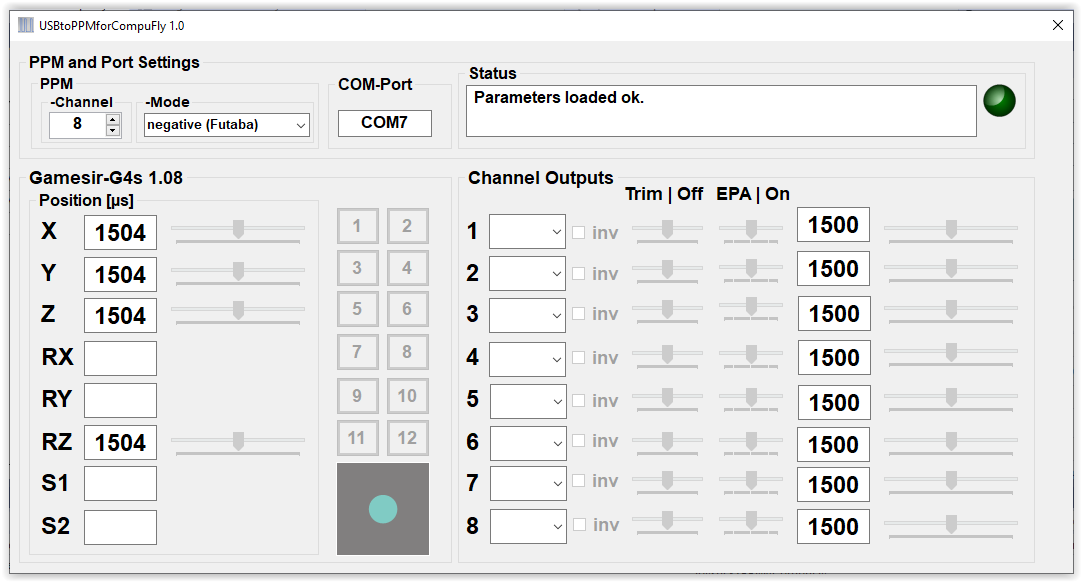
Die USBtoPPMforCompuFly-App behält die bewährte Bedienung des CompuFly-Programms weitgehend bei, präsentiert sich aber als komplett neu entwickelte Windows 10/11 App mit einer neueren Oberfläche und neuen Features.
Nach dem Start verbindet sich die App automatisch mit dem Converter und dem ersten angeschlossenen DirectX-fähigen Joystick oder Gamepad. Die verwendete Konfiguration wird bei Beendigung des Programms gespeichert und beim Neustart wieder geladen.
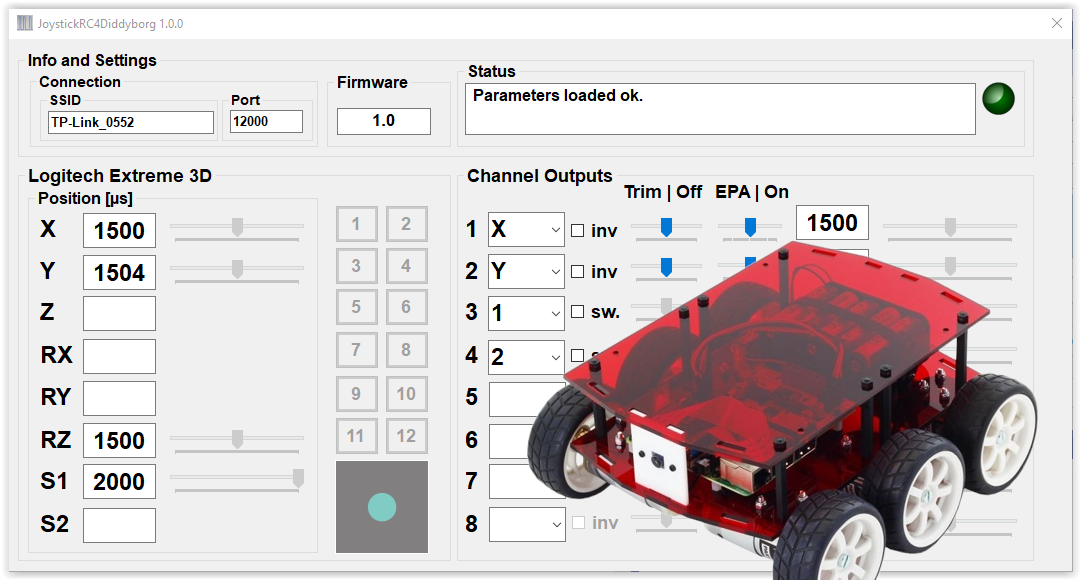
Die Bedieneroberfläche ist intuitiv und selbsterklärend: den Channel Outputs werden Joystick-Achsen bzw. Slider oder Buttons zugeordnet. Achsen und Slider-Kanäle können „getrimmt“ werden und zur Anpassung an spezifische Anwendungsfälle steht zusätzlich EPA (Einstellung des Servoweges) zur Verfügung.
Über den Umfang des Open Source Programms Compufly.zip version 1.35 hinaus bietet USBtoPPMforCompuFly eine Schalterfunktion für die Joystick-Buttons an. Hierzu ist ein Button als Eingang für einen Servokanal auszuwählen und die Checkbox „sw“ zu aktivieren.
Die USBtoPPMforCompuFly-App beziehen Sie im Microsoft App Store.