Übersicht
Mit der „picCAR“ App wird ein Android-Tablet oder Smartphone mit Bluetooth zum Fernsteuersender.
Die App basiert ursprünglich auf dem Cxem Car 1 Open Source Projekt. Es wurden verschiedene Anpassungen der Benutzeroberfläche vorgenommen und die Steuerbefehle auf den PiKoder/SSC RX Empfänger umgestellt.
Die App ist „Open Source“ und wird über Github bereit gestellt.
Bedieneroberfläche
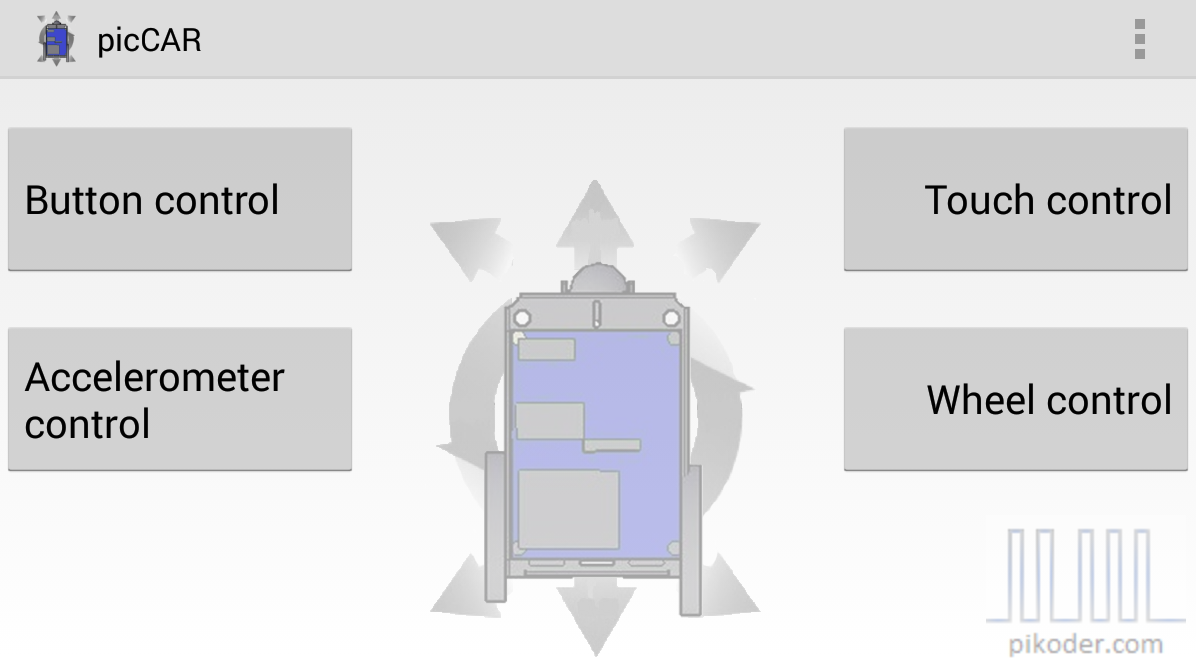
Die Bedieneroberfläche ist intuitiv und einfach verständlich. Es stehen vier verschiedene Modi zur Verfügung: über Tasten („Button Control“), virtuellen Joystick, Beschleunigungsmesser und eine Kombination aus Beschleunigungsmesser mit logischem Schieberegler. Die Verbindung zum Empfänger wird aufgebaut, sobald der Bedienmodus ausgewählt wurde.
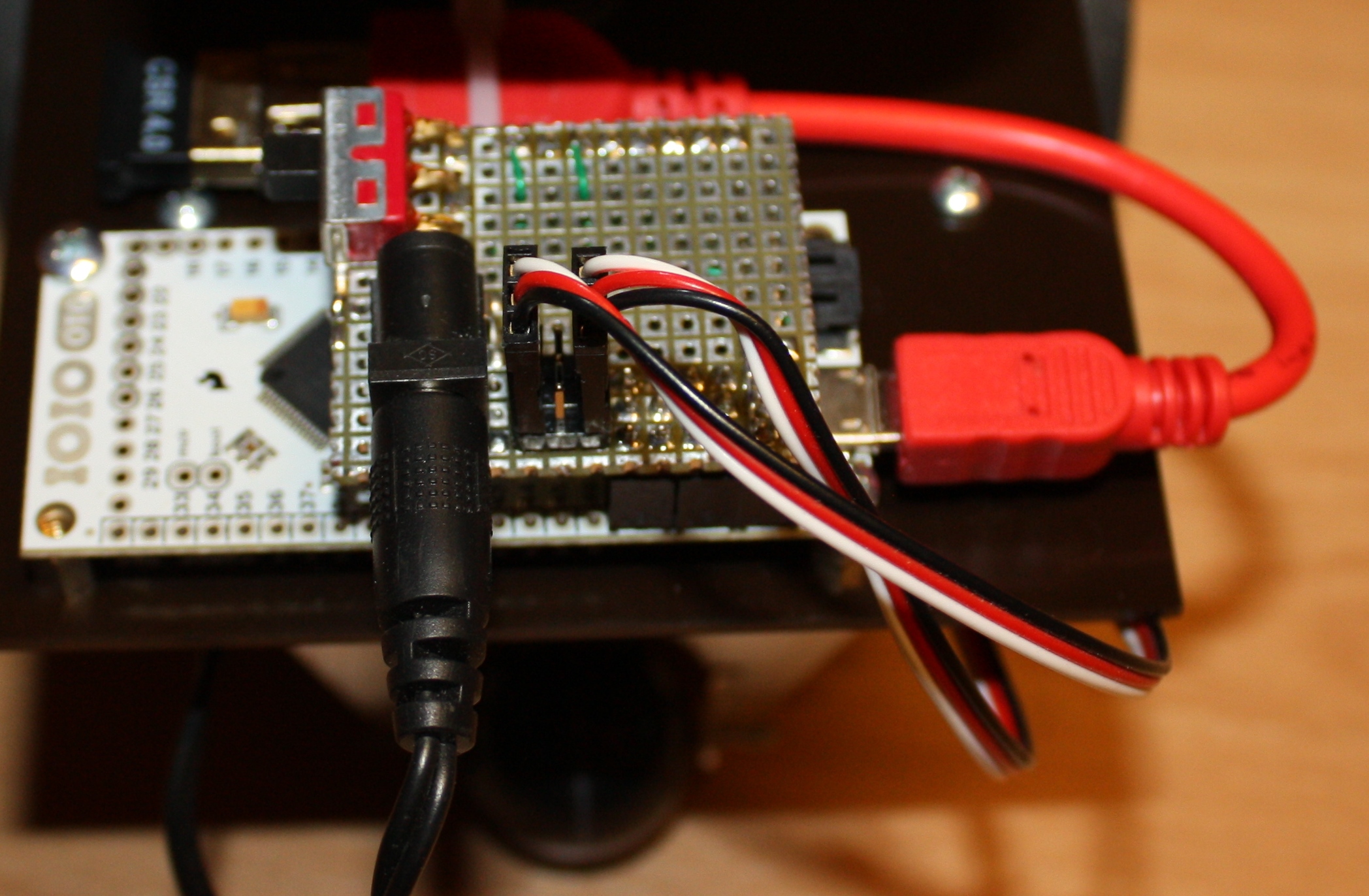
Der Aufbau des Empfängers ist auf der PiKoder/SSC RX Seite beschrieben. Die App wird von allen PiKoder/SSC Firmwareversionen unterstützt. Soll die Time-out-Funktion der App genutzt werden, dann ist mindestens Release 1.03 zu verwenden.
picCAR User’s Guide (.pdf File, DE)
Der picCAR User’s Guide beschreibt die Funktionen der picCAR APP im Detail.