Überblick
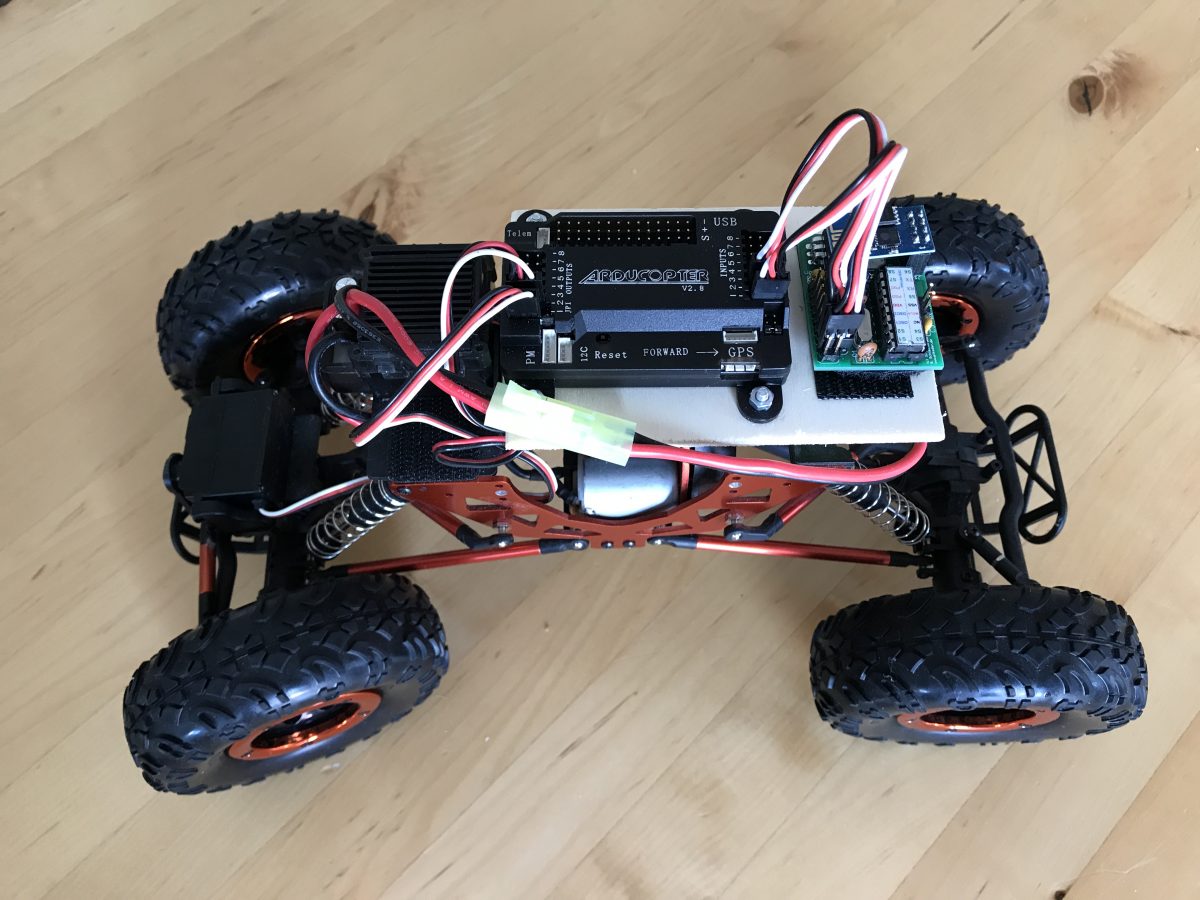
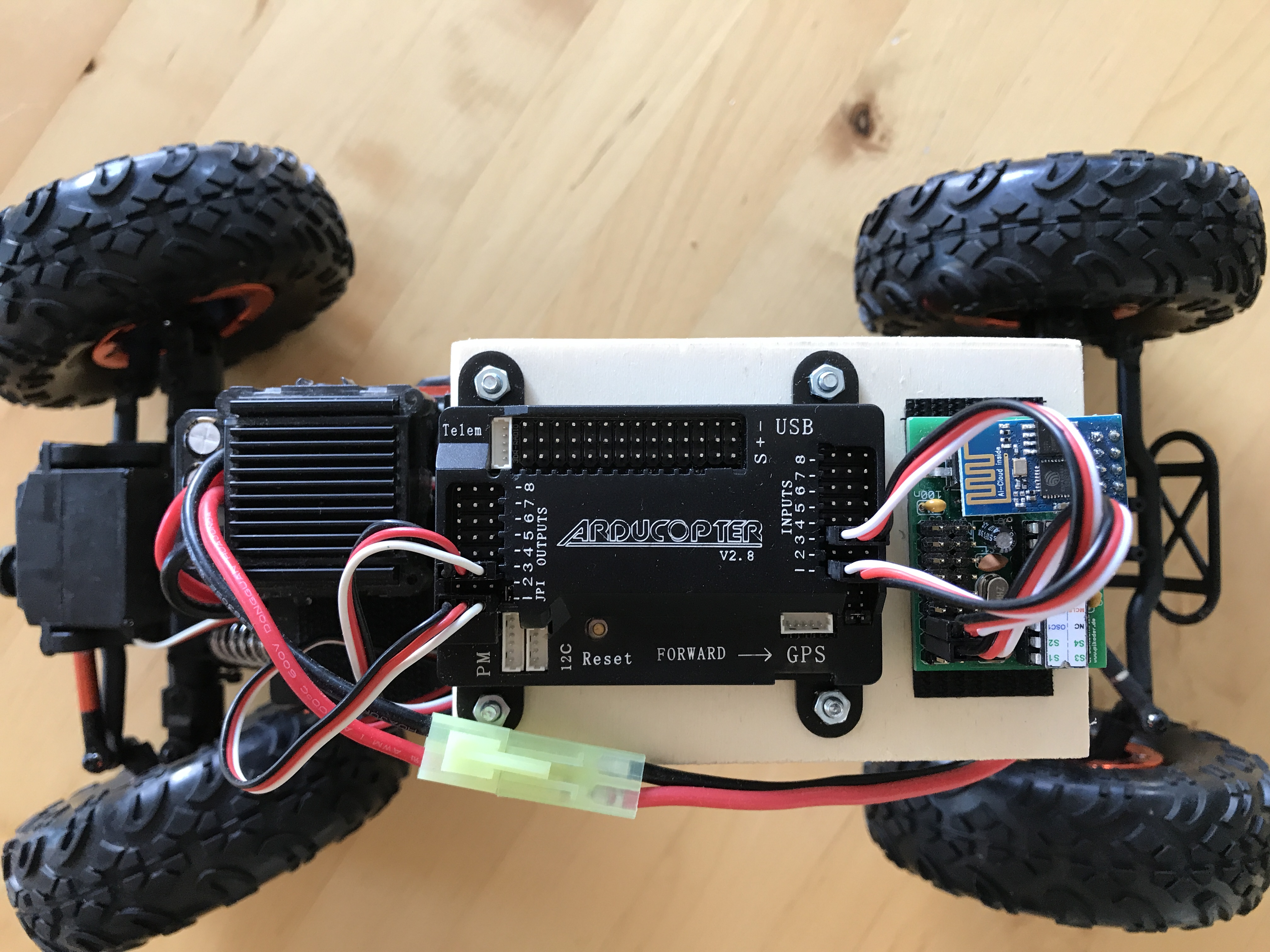
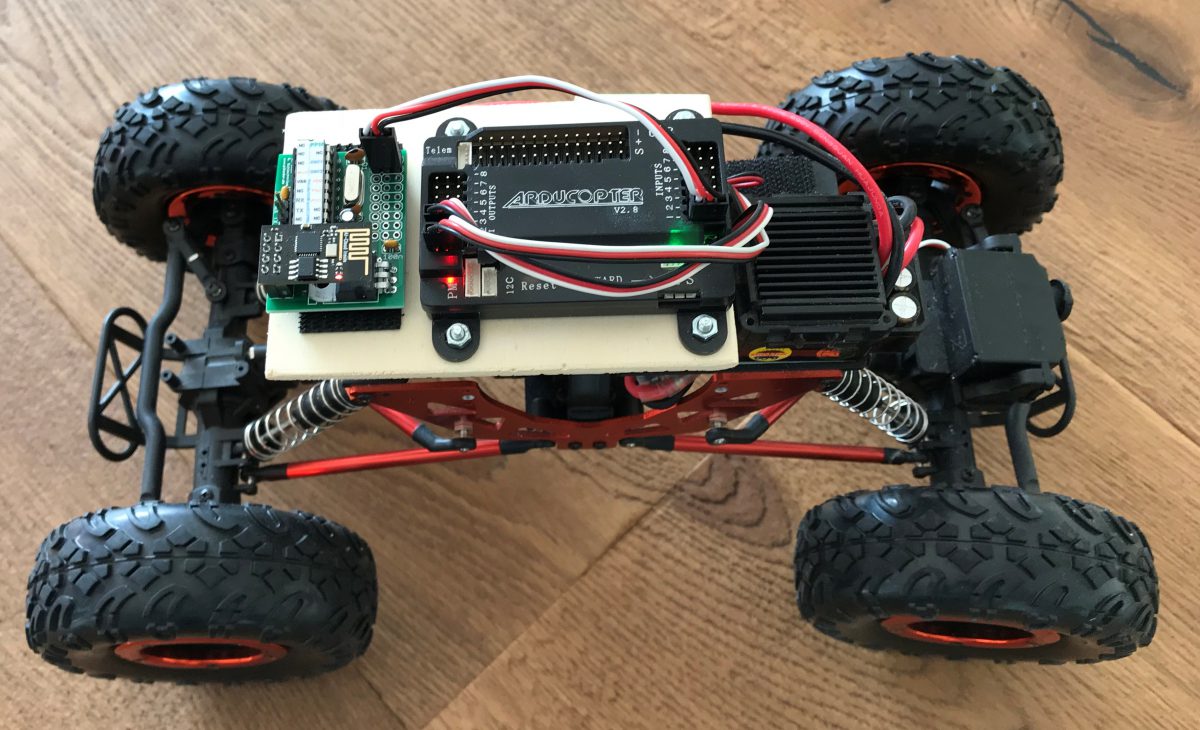
Der Ardupilot Mega (APM) und andere Flight Controller werden vorzugsweise über ein PPM-Summensignal angesteuert und nicht über die Einzelkanaleingänge wie im Teil I dieses Blogs beschrieben. Mit dem PiKoder/PPM wRX steht nun auch ein Empfänger zur Verfügung, der direkt ein PPM Signal liefert. Damit reduziert sich die Verbindung zwischen dem Empfänger und dem APM auf ein dreipoliges Kabel wie im Beitragsbild sichtbar.
Beschreibung
Der PiKoder/PPM wRX wird für die Anwendung in einem Rover ebenfalls von der udpRC4UGV App bedient, die im zweiten Teil des Beitrags beschrieben wurde.
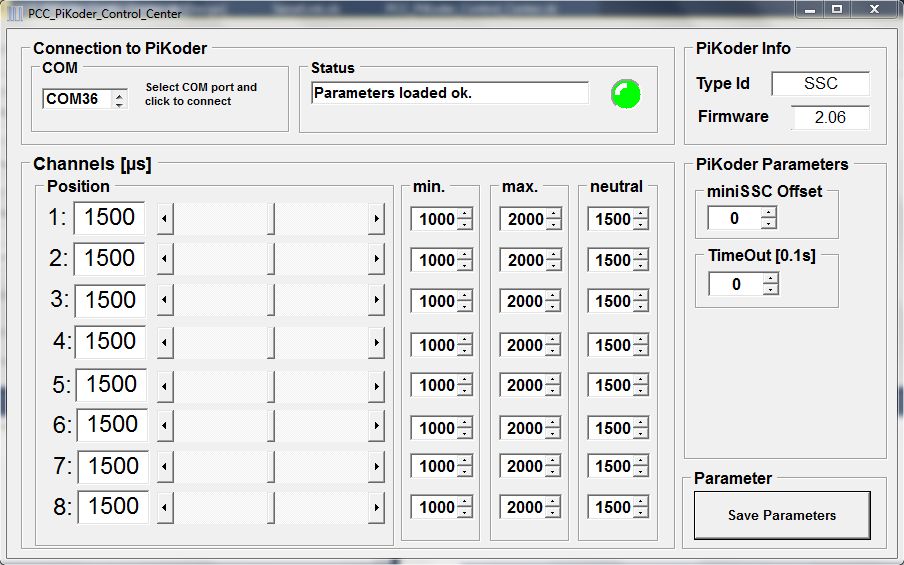
Diese App wurde so erweitert, dass die Position des Steuerkanals (direction) und des Motors (throttle) innerhalb des PPM Rahmens flexibel in den App Präferenzen festgelegt werden kann.
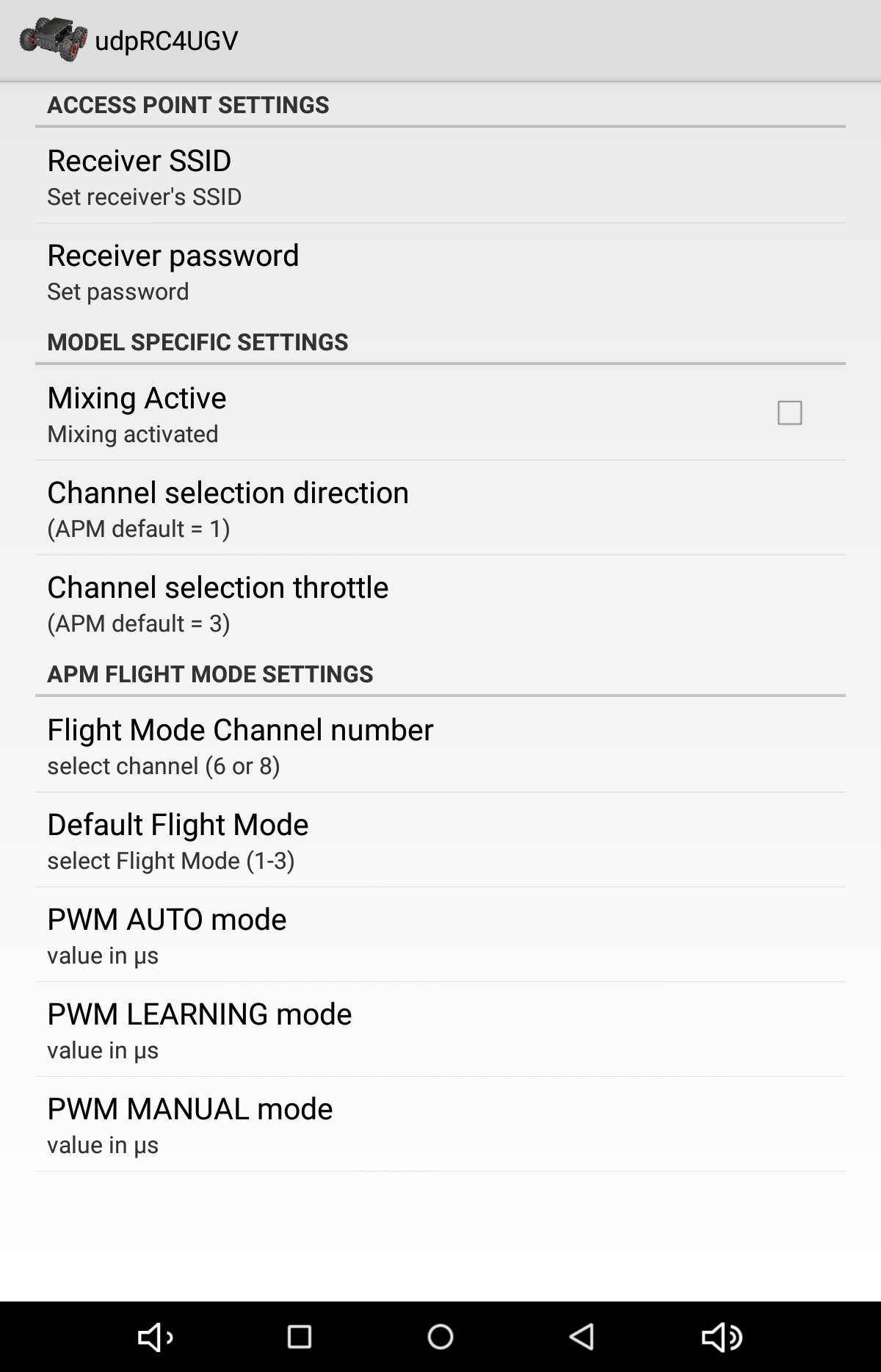
Die Eingabe erfolgt über die Auswahl der Präferenz und die Eingabe der Kanalnummer (1 .. 8). Beim APM liegt beispielsweise der Steuerkanal auf 1 (entsprechend default) und der Motorkanal auf 3.
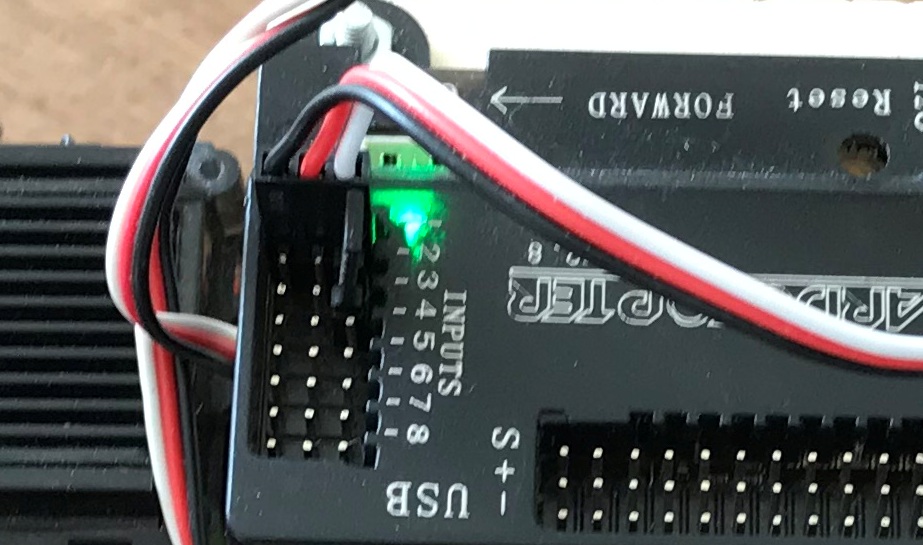
Bitte beachten Sie ebenfalls, dass für die Umschaltung des APM von der parallelen Eingabe je Kanal auf PPM zwischen Kanal 2 und 3 ein Jumper gesetzt werden muss (s.u.).