Overview
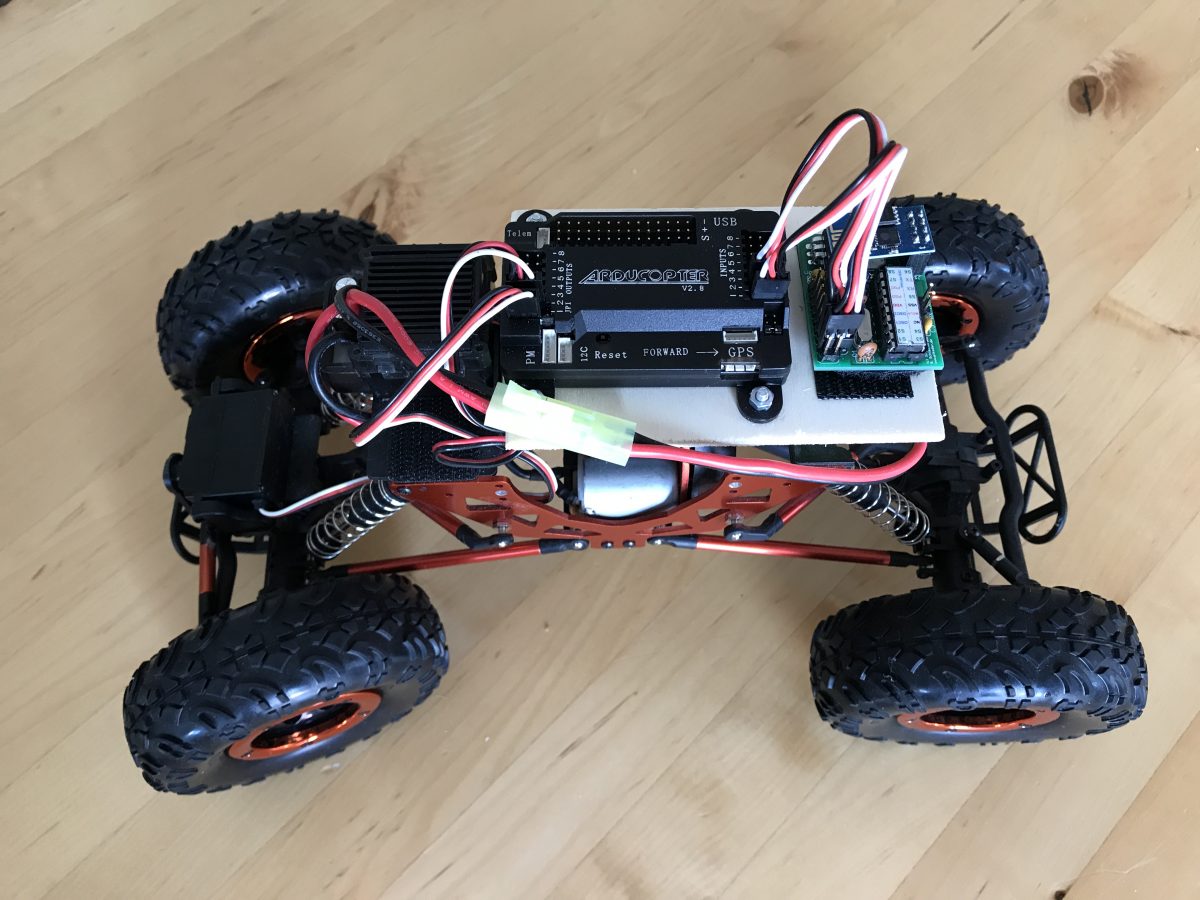
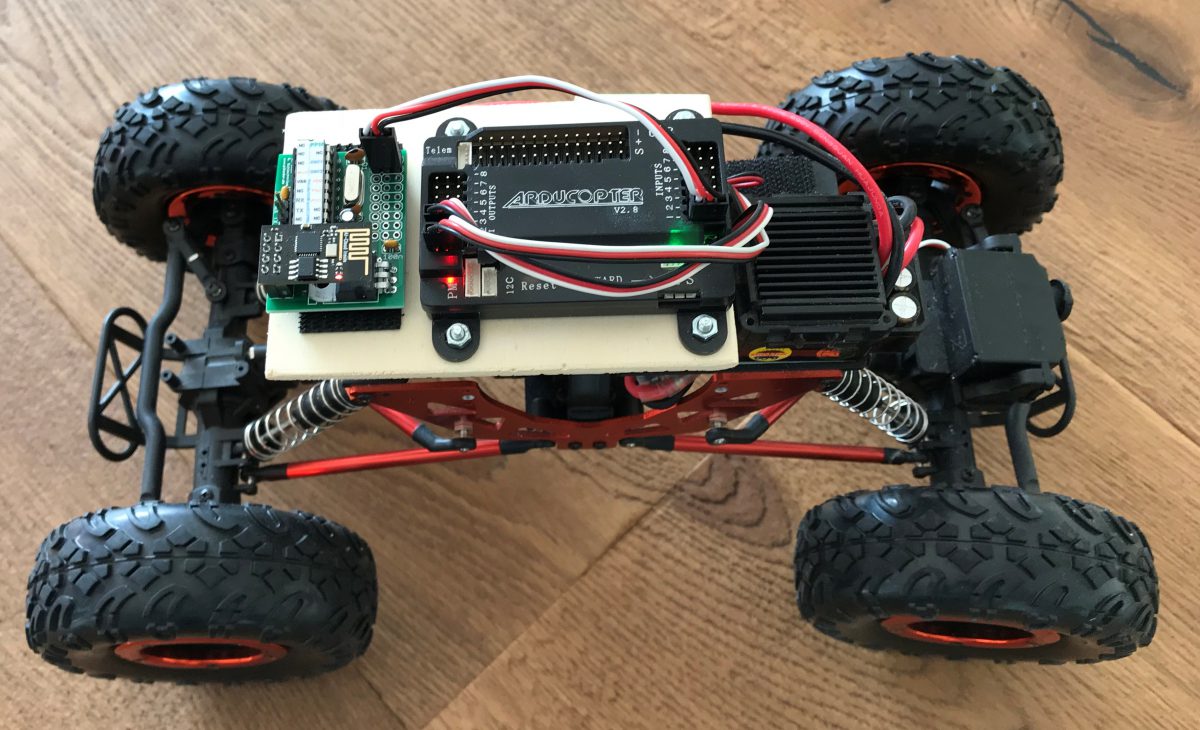
The Ardupilot Mega (APM) and other flight controllers are frequently controlled by a PPM stream rather than the parallel input per channel which I described in part 1 of this blog. The new PiKoder/PPM wRX receiver with its PPM frame output brings this capability to you. The connection between the receiver and the flight controller is reduced to a single 3 strand cable as shown in the featured image.
Description
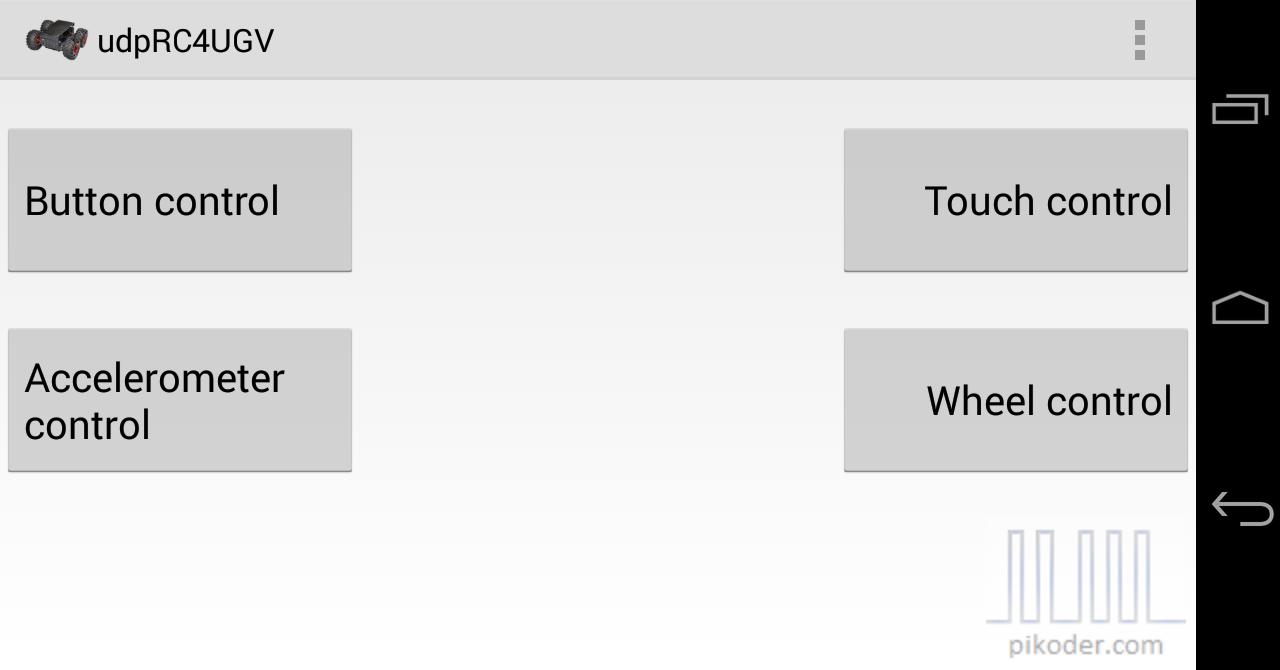
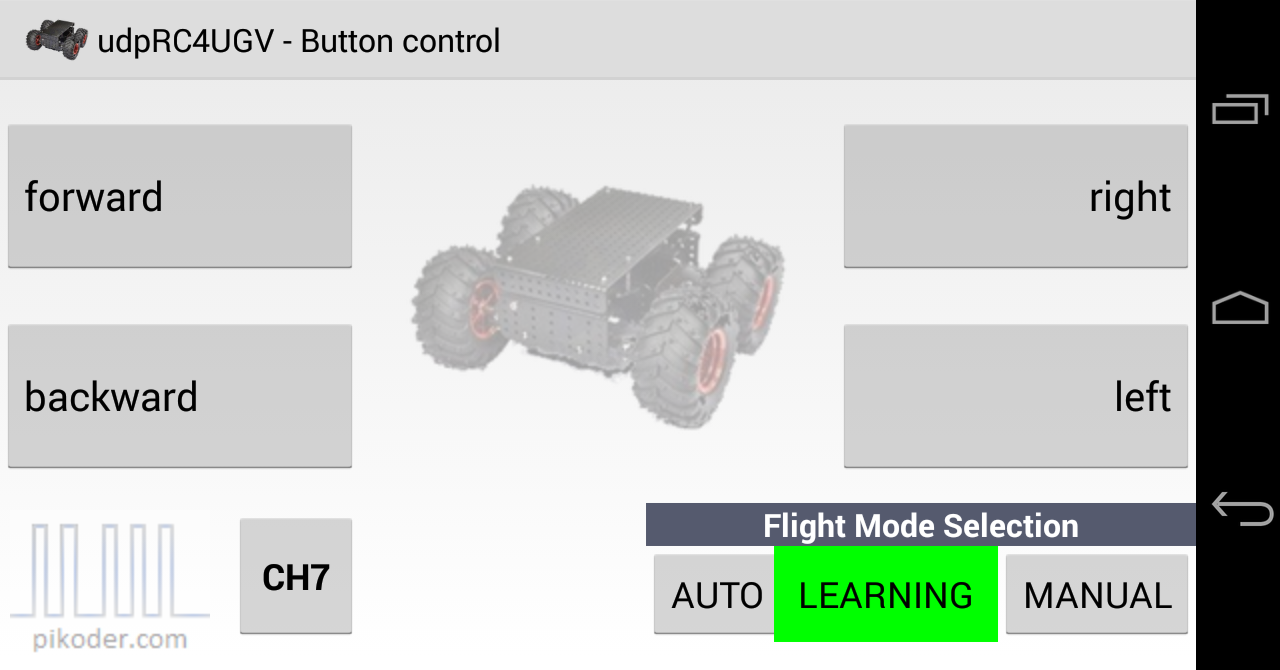
The PiKoder/PPM wRX receiver will be controlled by the udpRC4UGV App as described in part 2 of this blog.
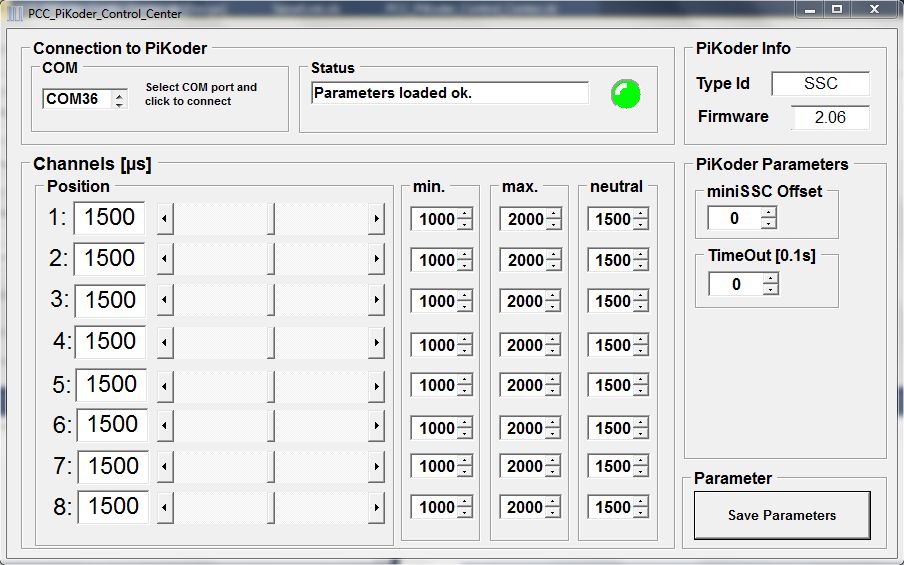
The feature set of the app has been extended to allow you to freely determine the position of the direction and throttle channel within the PPM frame through the app preferences.
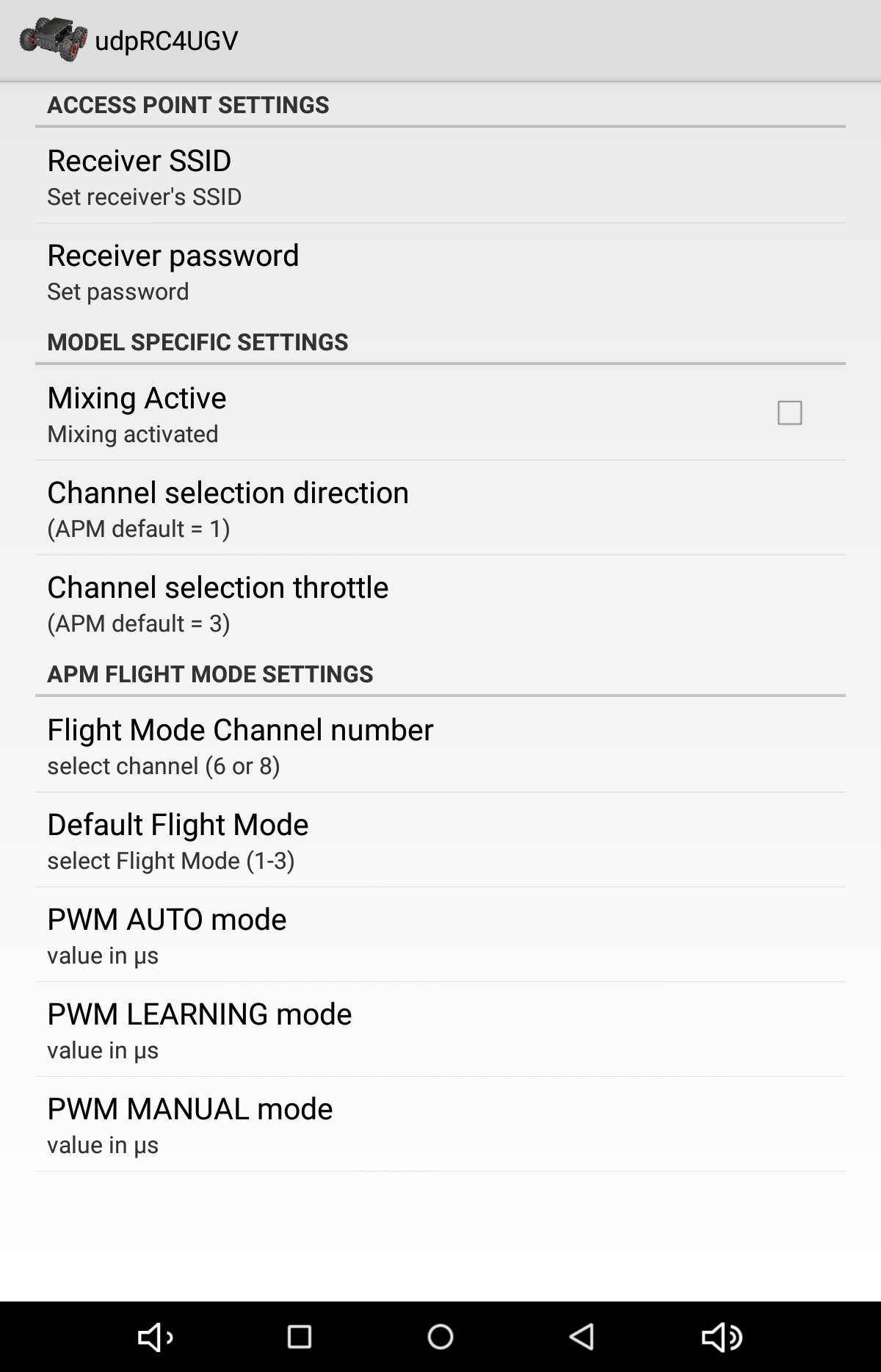
To change the channel setting please select the respective preference and enter the channel number (1 .. 8). E.g. the APM Rover configuration features direction on channel 1 and throttle on channel 3.
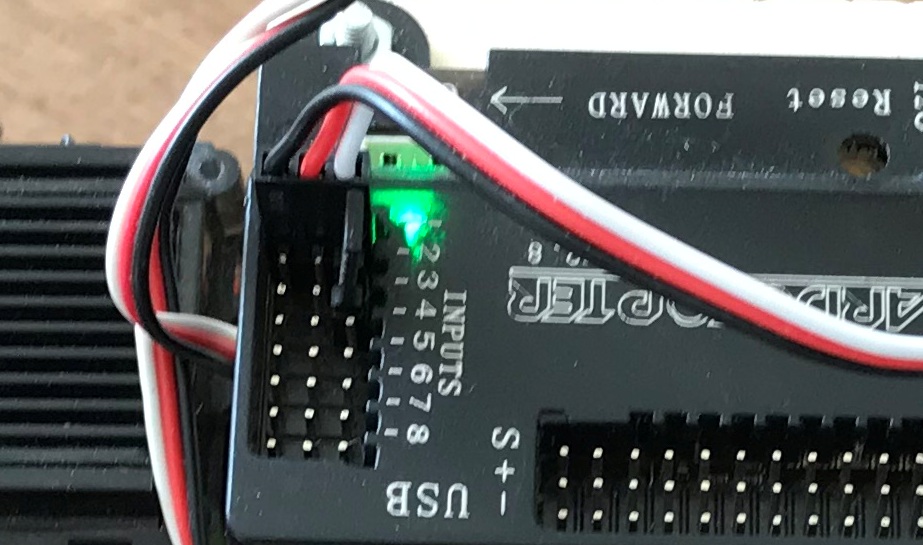
Please note that setting the APM’s input mode from parallel to PPM requires a jumper between channel 2 and channel 3 input as shown below.