Overview
In the field of robotics, it is often necessary to control several servos by wire, e.g. when realizing a robot arm or an underwater ROV. In this case, operation with a gamepad or joystick is ideal because the large number of axes / degrees of freedom enables efficient control of many channels.
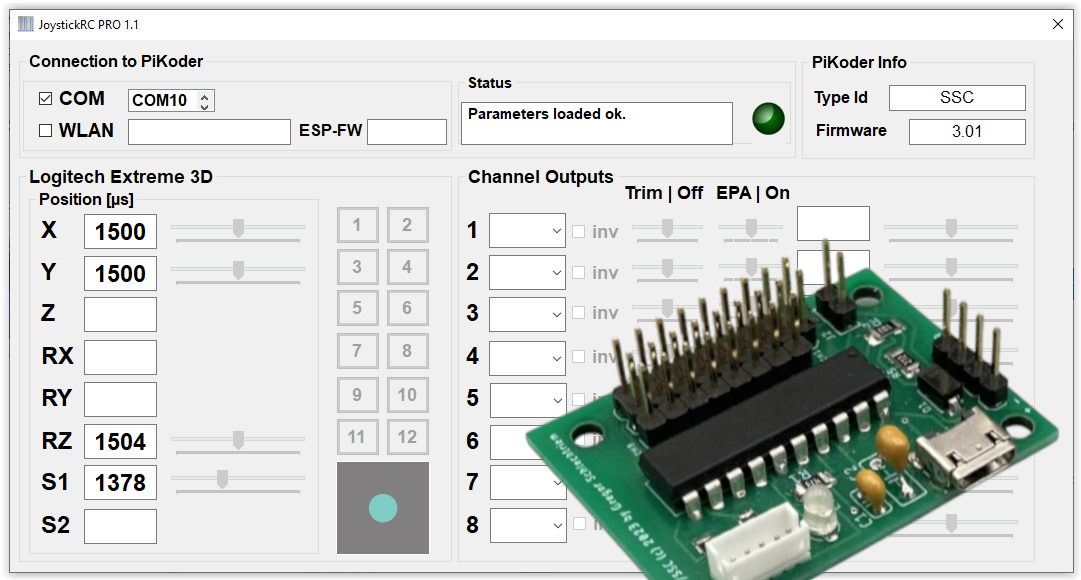
This blog describes the setup for controlling eight servos by wire using the free Windows APP JoystickRC.
The mapping of the axes and switches to the servo channels is done flexibly in the software. The actual pulse generation for the servos is performed by a PiKoder Serial Servo Controller (PiKoder/SSCng), which is connected to the PC via its USB interface.
Setup
The setup is ideally carried out with the aid of a PiKoder/SSCng –development board and with a standard USB cable. The PiKoder is supplied with power via the USB port. As the USB interface cannot supply enough power to operate the servos, they must be supplied with an independent power source via the terminal strip. In order to prevent balancing currents that could damage the PC, the jumper must not be plugged into the PiKoder circuit board under any circumstances. More detailed information can be found in the PiKoder User Manual.
Software
The JoystickRC program is available free of charge from the Microsoft Store. You can find more instructions on how to use the program on the program’s website.