The previous blog describes the Arduino PPM encoder. Together with a multi-protocol module, you can set up a complete remote control transmitter with little additional effort.
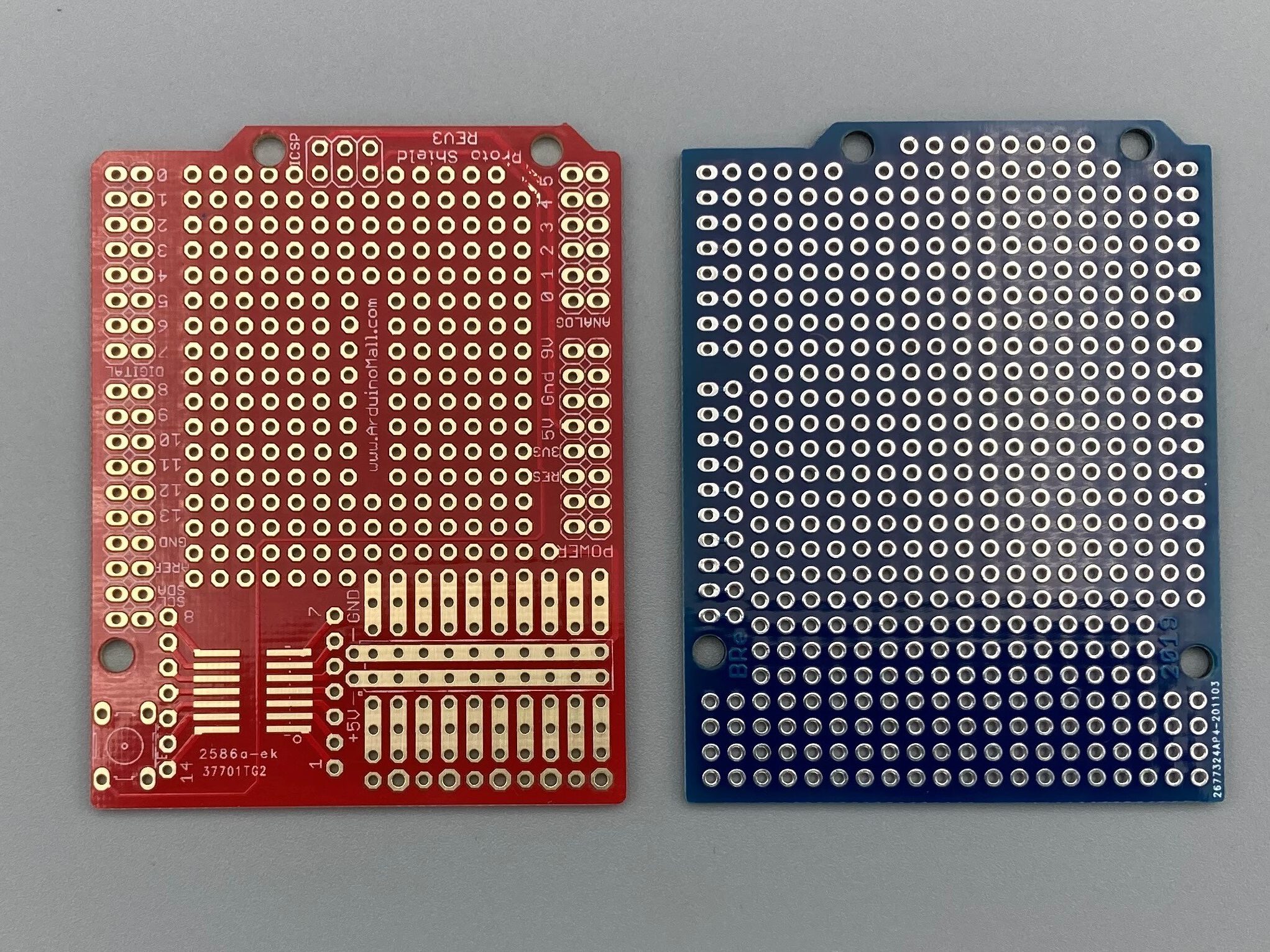
To do this, adapt the module using an Arduino prototype shield. However, not all shields are equally suitable. Some shields do not have a hole pattern in the lower right area but a specific layout like the red circuit board in the picture. But you need a prototype board with a complete breadboard like the blue circuit board.
You make the electrical connection between the Arduino and the module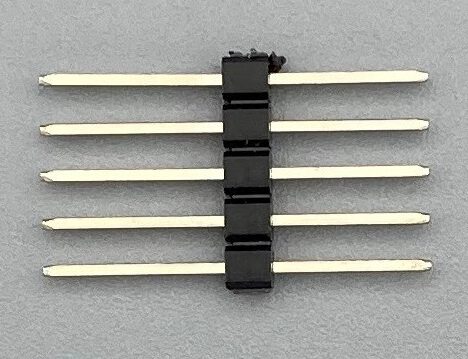 with a five-pole pin header with extra-long pins. Insert the pin header into the socket header on the back of the module. Then position the module on the prototype shield and find the correct position for the module and the soldering points that you need to use.
with a five-pole pin header with extra-long pins. Insert the pin header into the socket header on the back of the module. Then position the module on the prototype shield and find the correct position for the module and the soldering points that you need to use.
To ensure a secure hold, I have also provided Velcro tape. Since this additional intermediate layer changes the height of the soldering pins again, you can only solder the pins now.
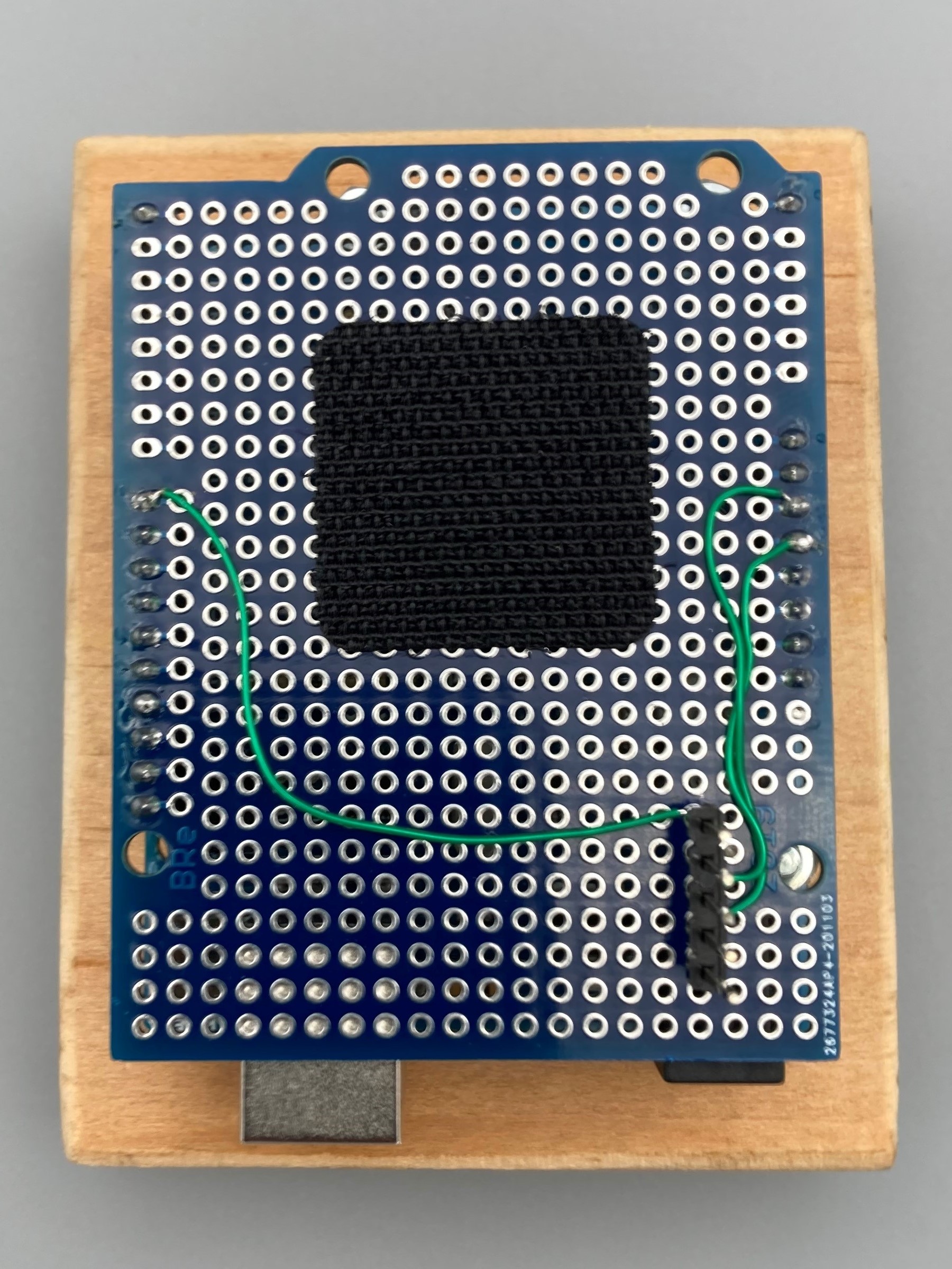
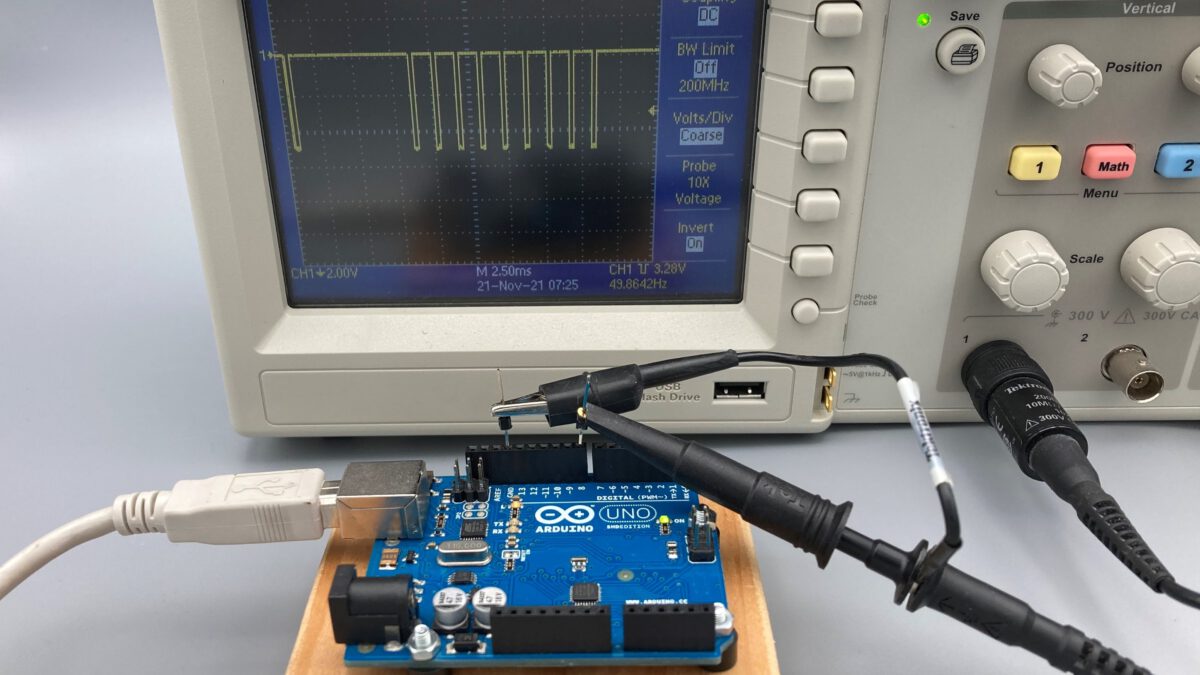
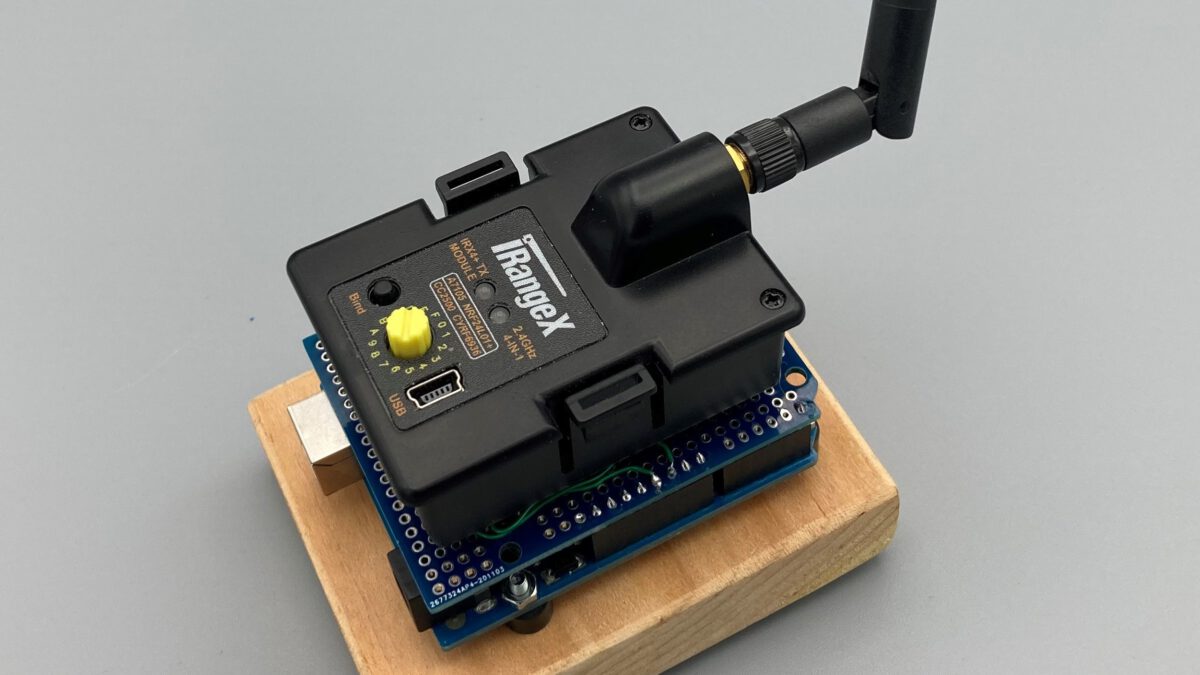
The wiring for the power supply and for the PPM signal can be found in the picture. The assembly is completed when the module is plugged in.