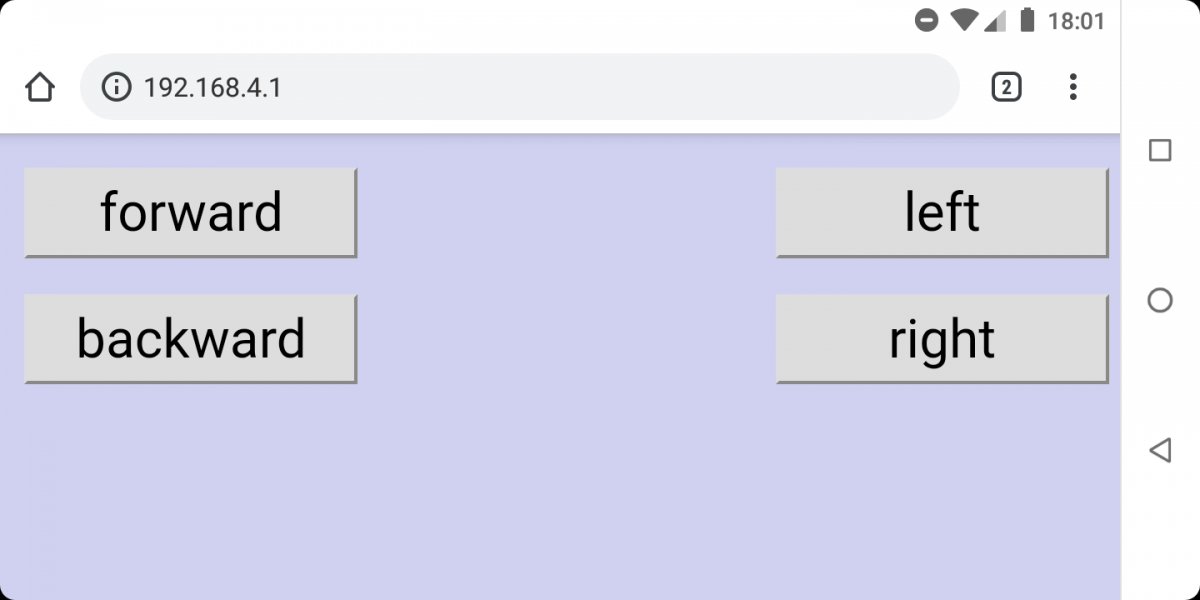
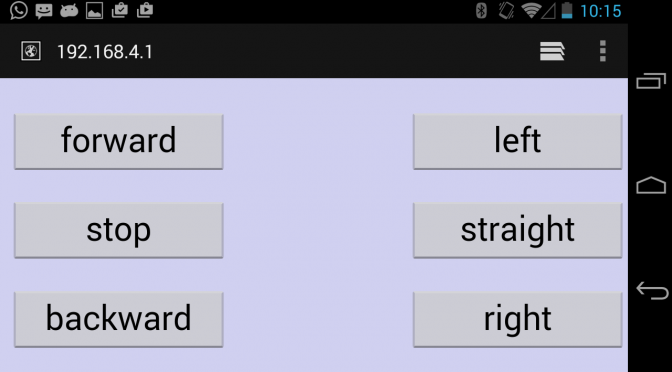
If your rc model would offer an access point and run a webserver, then you could control your model with a webbrowser running on your smartphone – no matter whether this is a Windows or Android device or an iPhone.
The PiKoder/SSC wRX (see below) is well suited as a hardware platform for this concept: the ESP8266-01 offers the access point and runs the webserver, the PiKoder/SSC manages all realtime aspects of controlling the servos and the electronic speed control.

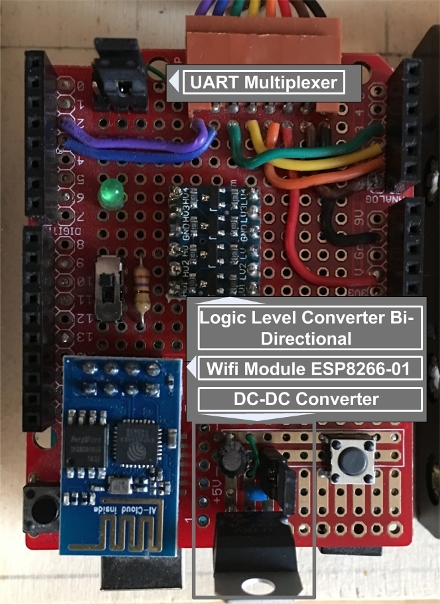
PiKoder/SSC wRX
The standard configuration of the PiKoder/SSC wRX requires the ESP8266-01 to act as a transparent bridge. Since we will be needing a webserver, we would have to flash this wifi controller with a new firmware. This can be easily accomplished by using the latest Arduino IDE which is supporting generic ESP8266 modules.
The new controller firmware is open source and would be available through the github repository makerprojects/httpRC. After downloading open the sketch in the Arduino IDE. At the beginning of the source code you will find the settings recommended for compiling the program. [Update December 27, 2018: The httpRC sketch has been completely revised and updated. Please check this blog for more details.]
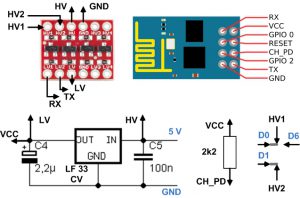
In order to flash the ESP8266-01 you will need an USB-Serial converter, since the wifi module does not feature a USB port. Please keep in mind also, that the ESP8266 requires a supply voltage of 3,3 Volts – the board is not 5 V tolerant! The offering of USB-Serial converter offering a 3,3 Volt supply as well as 3,3 Volt signal level is limited; therefore it might be easier to use a converter with 5 V supply and 3,3 V signal level such as the PL2303TA readily available at ebay (shown below) and build your own converter from 5 V to 3,3 V.

USB-Serial connector
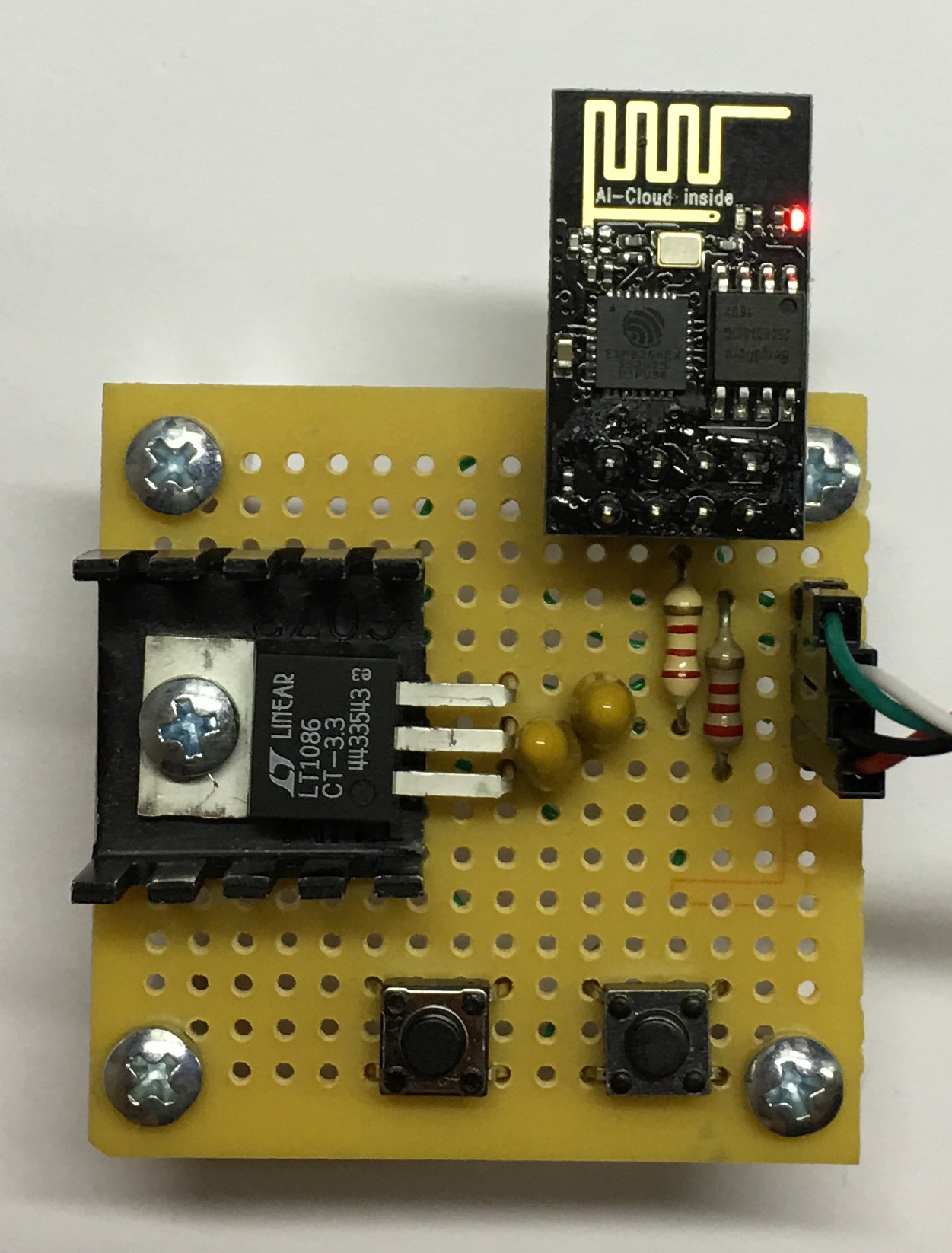
Since you would need a “reset” and “program” button for flashing the module you might consider to construct the little adapter shown below using a prototype board.
Programming adapter for the ESP8266-01
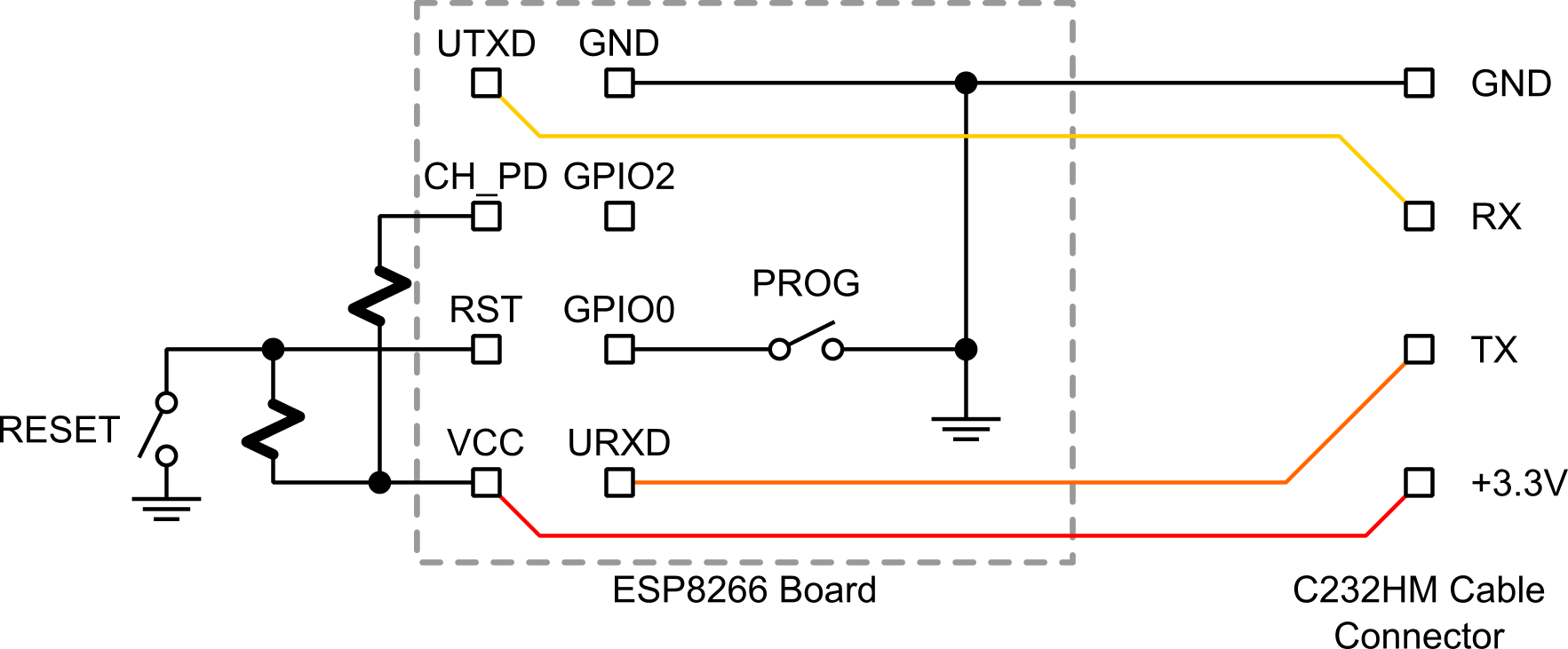
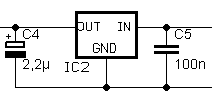
The schematic for the programming is shown below.
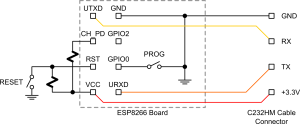
The conversion of the 5 V provided by the USB-Serial adapter to 3,3 V follows the design of the PiKoder/SSC wRX and requires a standard low drop voltage controller LF 33 CV ( please refer to the following excerpt of the PiKoder/SSC wRX schematic; the 5 V input would be to the left, the output is to the right).
Unfortunately the flashing of the ESP8266 does not start automatically as you might be used to when downloading a program into your Arduino but has to be initiated manually. You would push the RST and PROG button simultaneously and release the RST button while still holding the PROG button. After releasing the PROG button, the module would be in flash mode. Now you would start uploading the program. Now you would start uploading the program. Once the upload is complete your controller would require another reset prior to being operational. Once the upload is complete your controller would require another reset prior to being operational.