Der Open Source Arduino Sketch arduinodtx implementiert die Bedieneroberfläche und die Bedienelemente für einen leistungsfähigen Modellfernsteuerungssender mit einem seriellen Kommandoausgang (PiKoder/SSC kompatibel). Für die Kommandoübertragung zum PiKoder wird ein transparenter serieller Kommunikationskanal benötigt.
Soll WLAN als Übertragungsweg genutzt werden, dann kann ein solcher Kanal senderseitig mit einem ESP8266-01 Modul realisiert werden; als Empfänger kommt ein PiKoder/SSC wRX zum Einsatz.
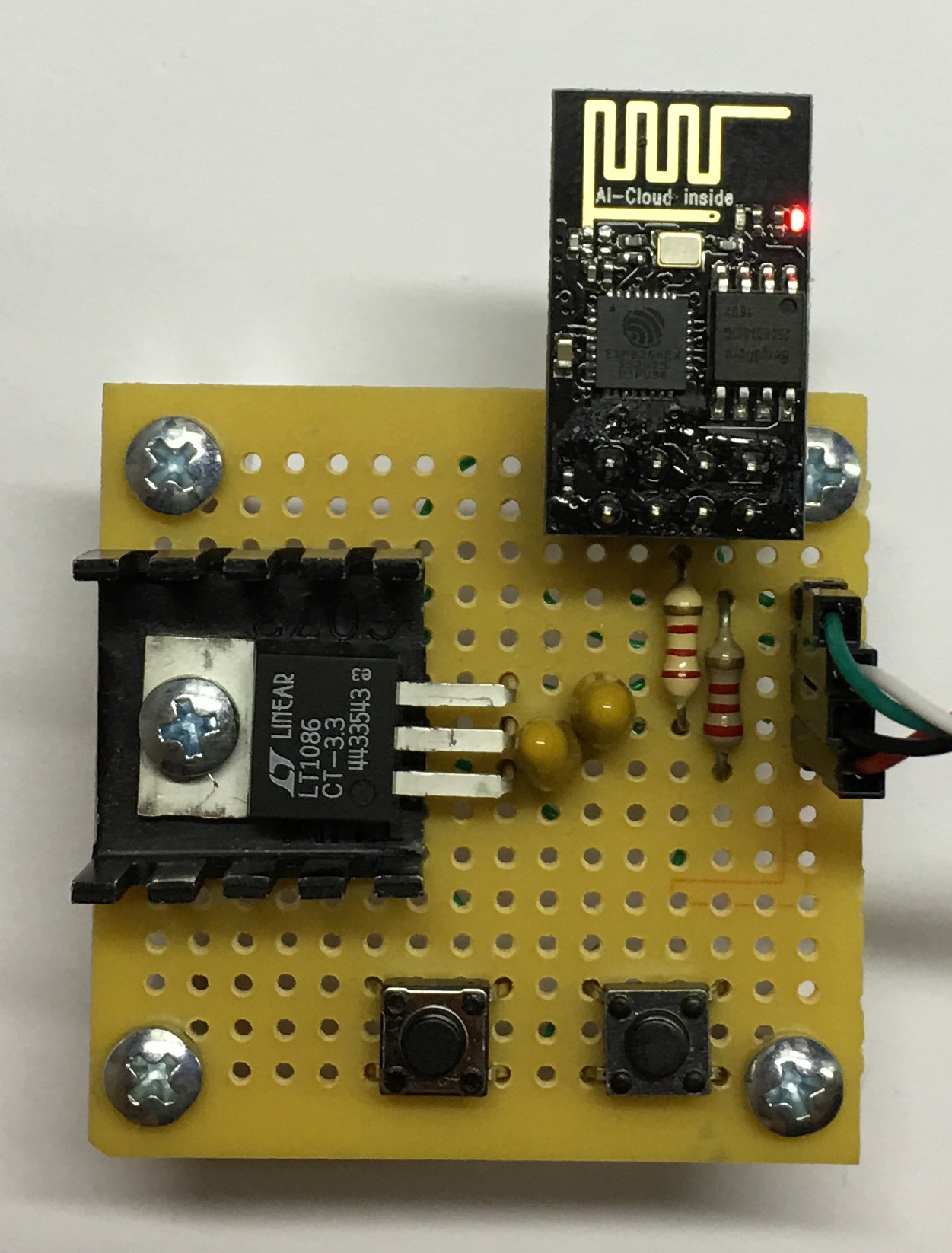
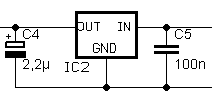
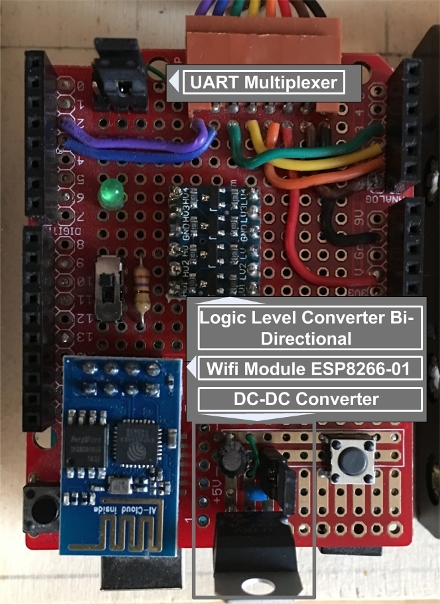
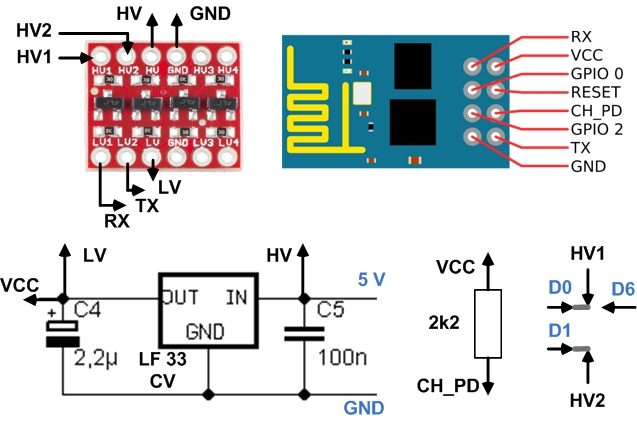
In diesem Fall werden neben den Basiskomponenten wie Steuerknüppeln, Schalter, etc., die zum Aufbau des arduinodtx-basierten Fernsteuersenders erforderlich sind, ein Logic Level Umsetzer von 5 auf 3,3 Volt, zwei Jumper zur Umschaltung der seriellen Kommunikationsschnittstelle (UART-Multiplexer) und ein ESP8266-01 Modul benötigt wie im Beitragsbild dargestellt. Die Verdrahtung entnehmen Sie dem folgenden Schaltbild (die Signale mit gleicher Bezeichnung müssen verbunden werden, Signale in blauer Schrift sind mit den entsprechenden Arduino-Signalen zu verbinden):
Der Aufbau ist relativ einfach und sollte problemlos auf einem Prototyp-Board erfolgen können.
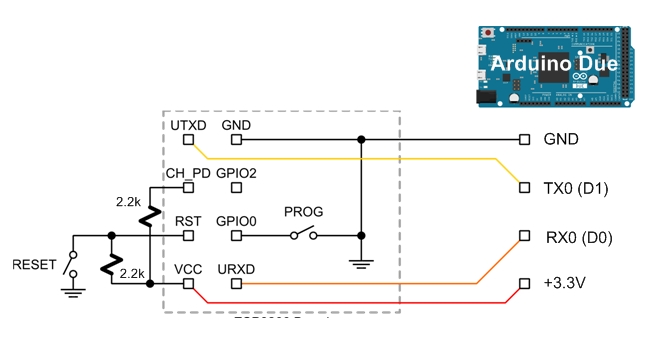
Im nächsten Schritt ist der ESP8266-01 als Access Point mit seriellem Ausgang zu programmieren – die Beschreibung hierzu finden Sie im Blog ESP8266-01 Sketch für den PiKoder/SSC wRX. Wollen Sie den ESP8266-01 im „eingesetzten Zustand“ programmieren, dann müssen Sie die dargestellte Schaltung um einen Programmierteil erweitern:
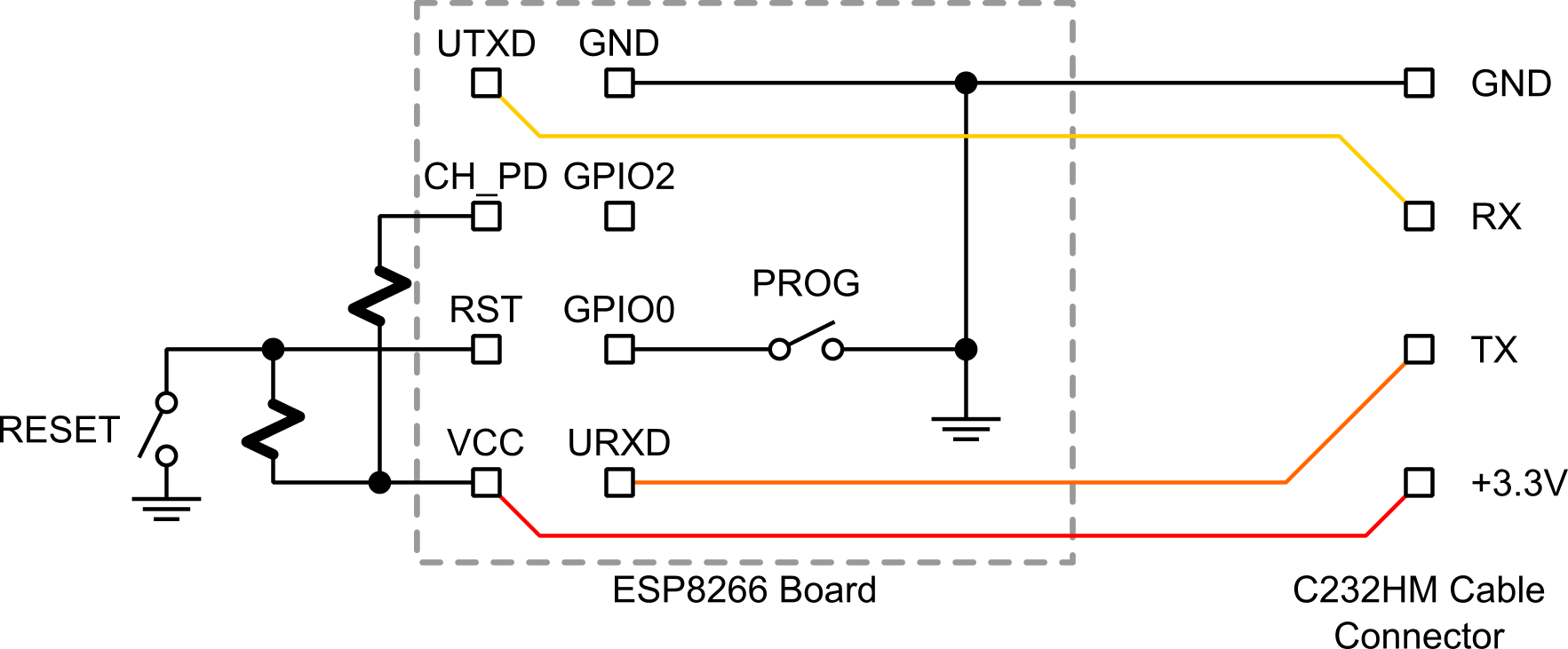
Bitte beachten Sie auch die Jumperstellung für D0/D1. Zusätzlich sollte bei jeder direkten Kommunikation mit dem ESP8266-01 der Arduino „stillgelegt“ werden (RESET Leitung auf GND legen), so dass die Datenübertragung nicht gestört wird.
Mit dem erfolgreichen Abschluss der Programmierung des ESP8266-01, dem Umstecken der Jumper, Aufwecken des Arduino und einem Reboot ist die Modellfernsteuerung betriebsbereit.