In diesem Blog beschreibe ich, wie ich die Joystick- / Gamepad-Fernsteuerung meines RPI-gesteuerten DiddyBorg zu QGroundControl und MAVLink als Kommunikationsprotokoll weiter entwickelt habe.
Damit habe ich die Basis geschaffen, um zukünftig in einer Standardumgebung weitere Sensoren zu verarbeiten und Missionen für den DiddyBorg zu planen und durchzuführen.
Softwareinstallation auf dem Raspberry Pi (RPi)
Auf dem RPi installieren Sie zunächst pymavlink, die Python-Version der MAVLink-Libraries. Am einfachsten geht dies mit PIP:
pip install pymavlink
Dann erstellen Sie ein Verzeichnis, z.B. diddy2QGC, in das Sie die Python-Module diddy2QGroundControl.py und ThunderBorg3.py aus dem Github-Repository dieses Projekts kopieren. In diesem Verzeichnis starten Sie dann später das Python-Skript mit:
python diddy2QGroundControl.py
Softwareinstallation auf dem Desktop
Installieren Sie QGroundControl auf Ihrem Desktop.
Starten der Anwendungen
Stellen Sie sicher, dass sich der RPi und Ihr Desktop im gleichen Netzwerk befinden und starten Sie QGroundControl (QGC) und das Python-Skript (die Reihenfolge ist ohne Bedeutung).
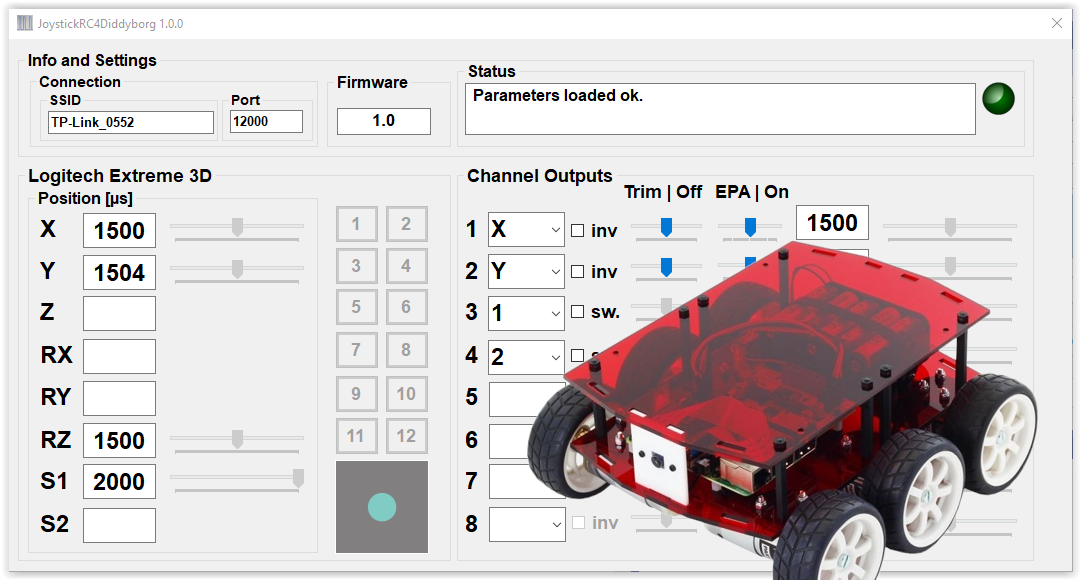
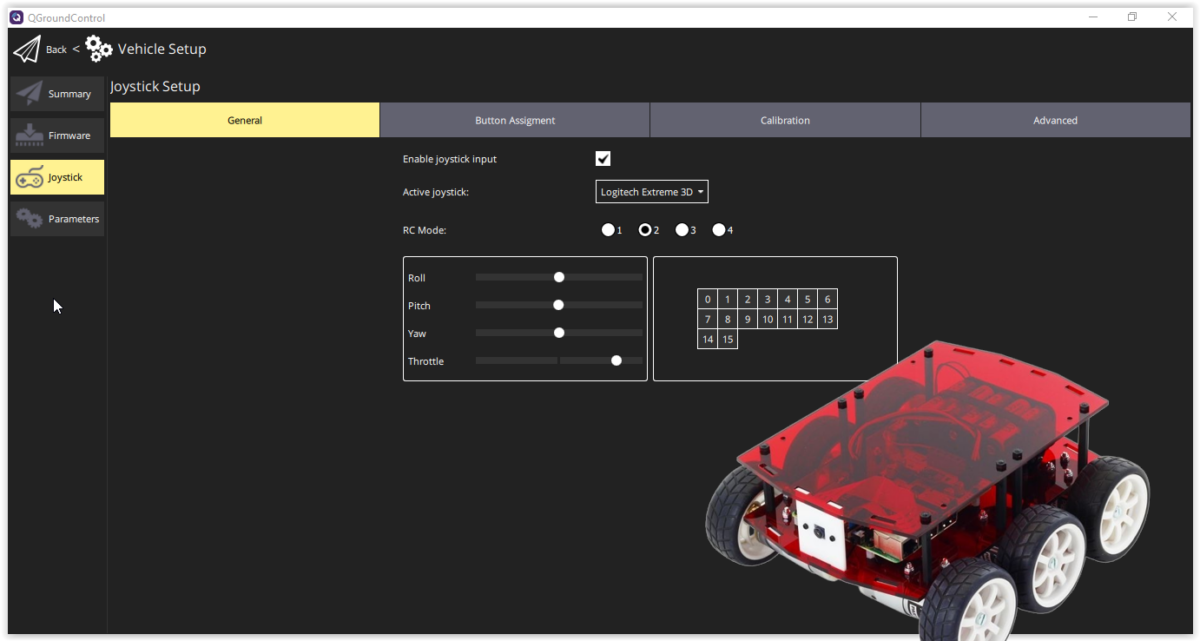
Der DiddyBorg sendet Heartbeat-Messages, die von QGC erkannt und beantwortet werden. Nach dem Austausch einiger weiterer Messages (bitte nicht von den Fehlermeldungen irritieren lassen), ist die Verbindung hergestellt und Sie finden dann in den Vehicle-Einstellungen die Möglichkeit, Ihren Joystick einzulernen. Bitte beachten Sie dabei, dass diddy2QGroundControl.py im Mode 2 den Roll-Kanal für die Rechts/Links-Steuerung und den invertierten Wert des Pitch-Kanals für die Motorsteuerung verwendet.