Der Servoausgang eine RC Empfängers stellt zwar alle Informationen bereit, die zur Steuerung eines L298N Motortreibers benötigt werden, aber das Signal muss in geeigneter Weise ausgewertet und neu kodiert werden, da die Ansteuerungslogik des Motortreibers grundsätzlich anders ist als die eines RC Servos.
Diese Aufgabe kann der RCRX2Bridge II Baustein übernehmen. Es handelt sich dabei um eine Ein-Chip-Lösung, die jeweils einen Kanal auswertet und damit einen Motor der L296 Brücke ansteuert.
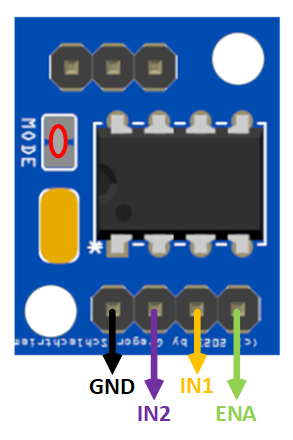
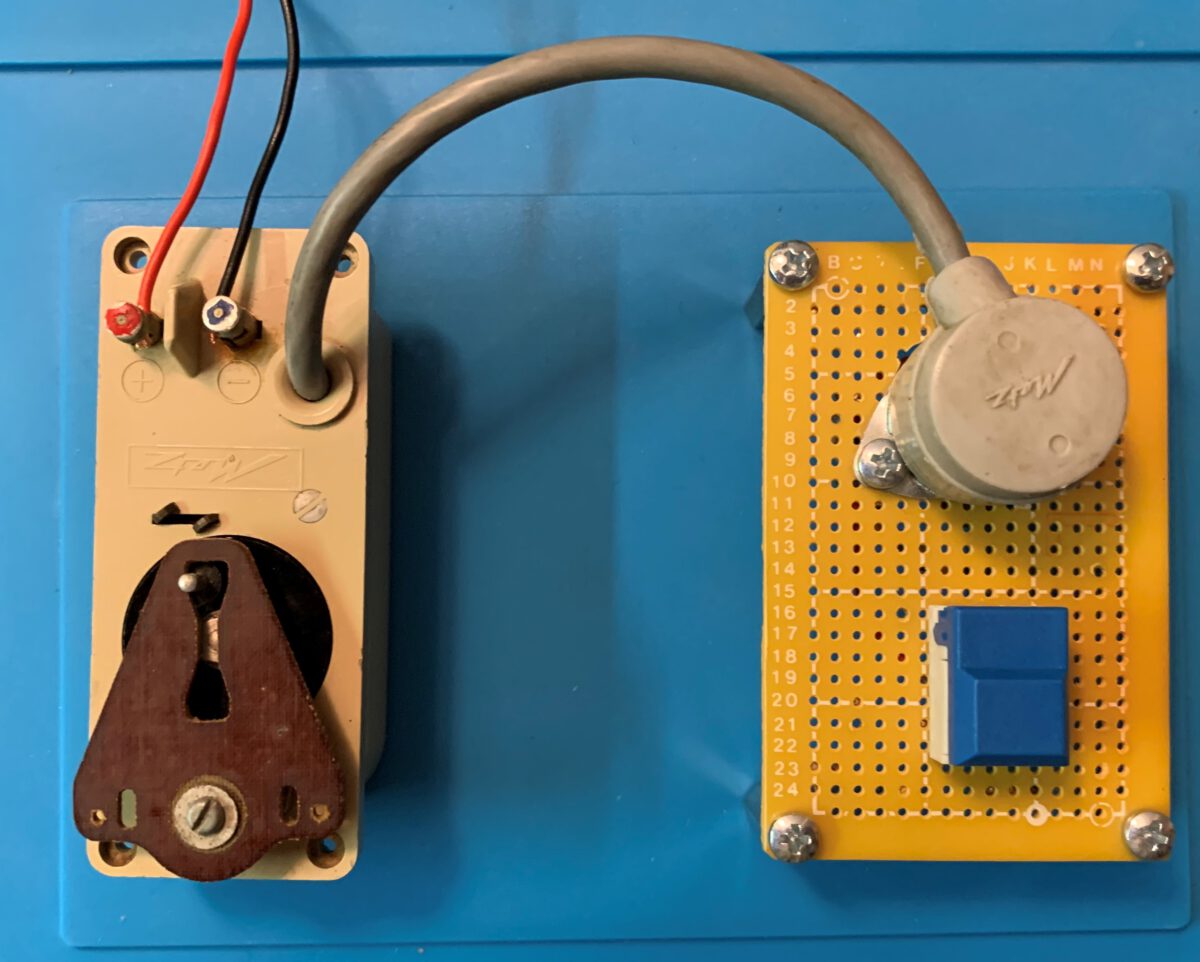
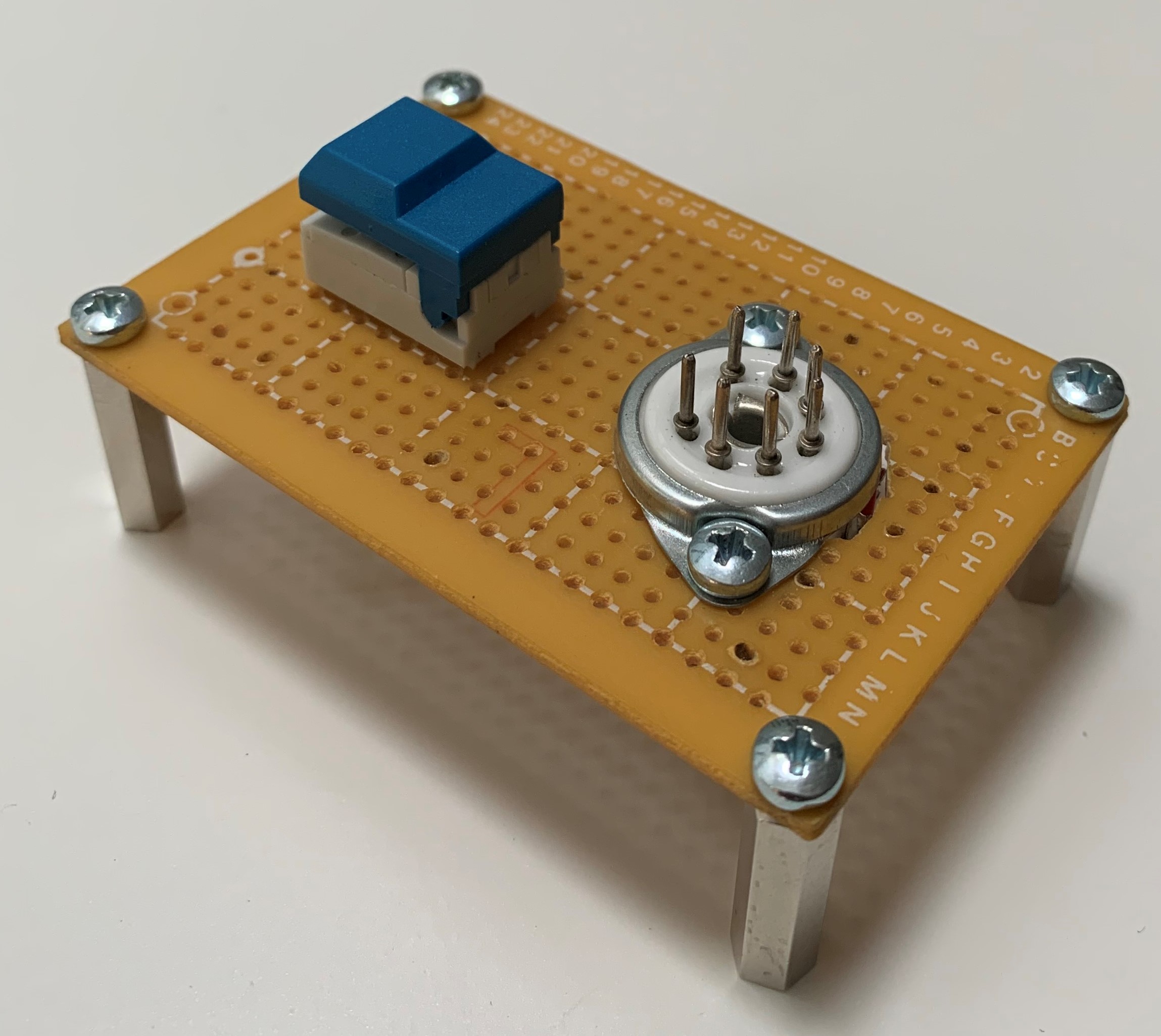
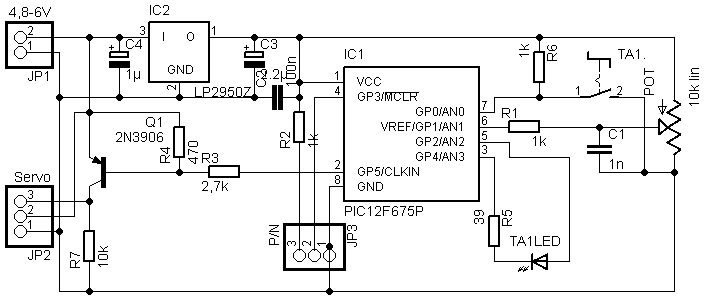
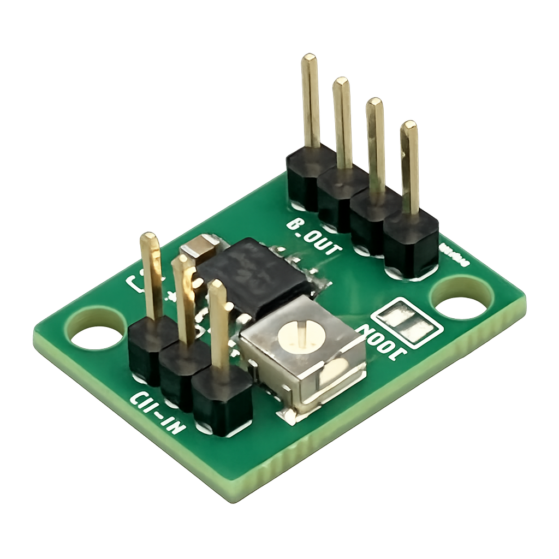
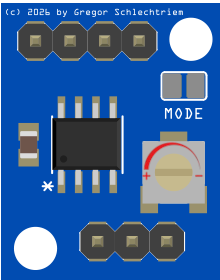 Mit der neuen Version des Bausteins wird die Breite des Bereichs indem der Motor nicht angesteuert wird, die Hysterese, über einen Trimmer auf der Leiterplatte einstellbar (s. Bild). Damit können nun auch einfachere Fernsteuerempfänger, bei denen die Impulsbreiten auch in der Neutralstellung um mehr als 5 µs (bis maximal 100 µs (Trimmer ganz links)) schwanken, unterstützt werden.
Mit der neuen Version des Bausteins wird die Breite des Bereichs indem der Motor nicht angesteuert wird, die Hysterese, über einen Trimmer auf der Leiterplatte einstellbar (s. Bild). Damit können nun auch einfachere Fernsteuerempfänger, bei denen die Impulsbreiten auch in der Neutralstellung um mehr als 5 µs (bis maximal 100 µs (Trimmer ganz links)) schwanken, unterstützt werden.
Die Schaltung ist sehr einfach und das Breakout-Board ist bereits mit allen SMD-Bauteilen bestückt, so dass nur noch die Stiftleisten zu bestücken sind. Die Baugruppe ist sowohl elektrisch als auch mechanisch rückwärtskompatibel zur ersten Version der RCRX2Bridge.
RCRX2Bridge II unterstützt auch weiterhin die zwei gängigen, aber unterschiedlichen Ansteuerungen von L298N Brücken: Modelle mit 2/4 Phasen und Modelle mit zwei Logik- und einen Speed-Eingang.
Ansteuerung von Brücken mit zwei Eingängen
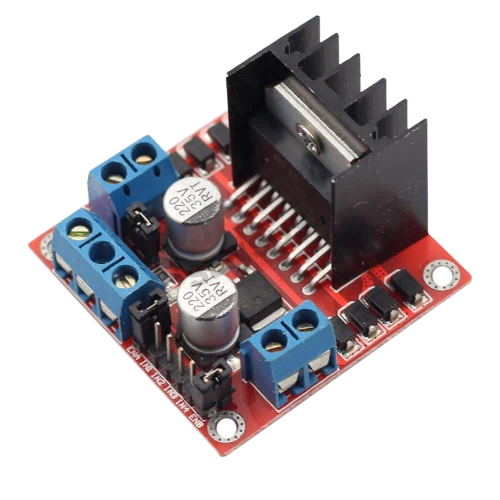
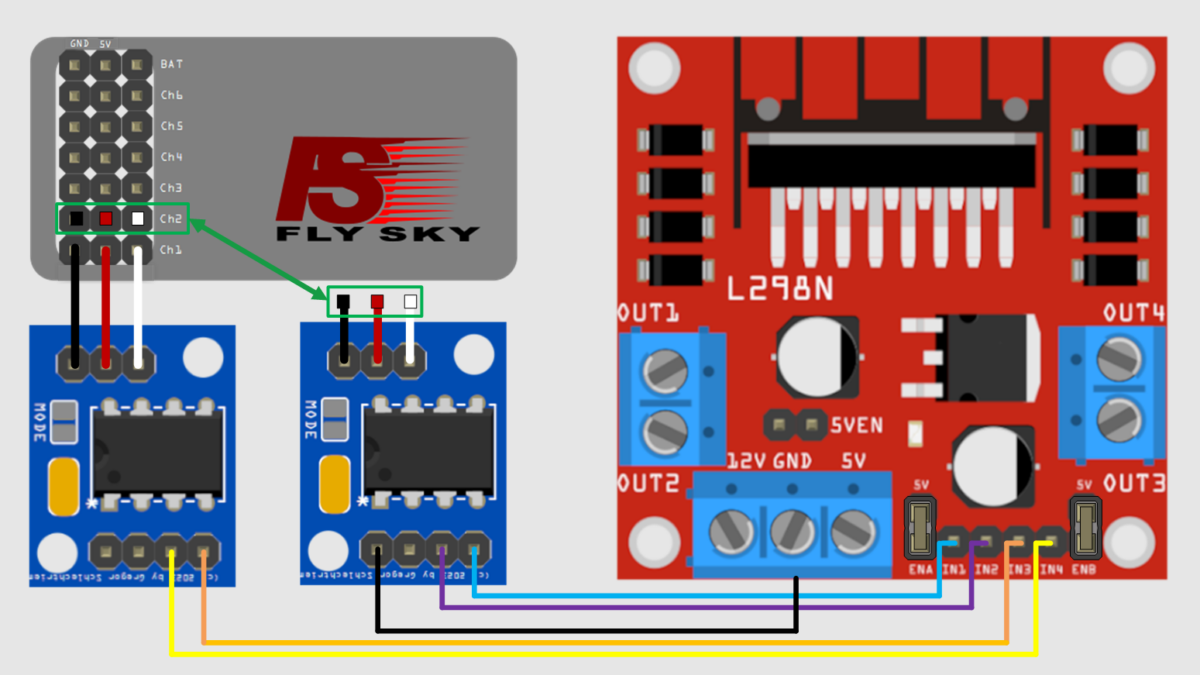
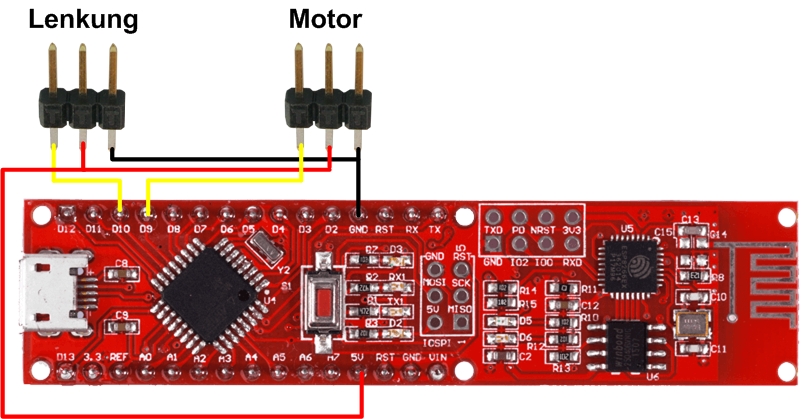
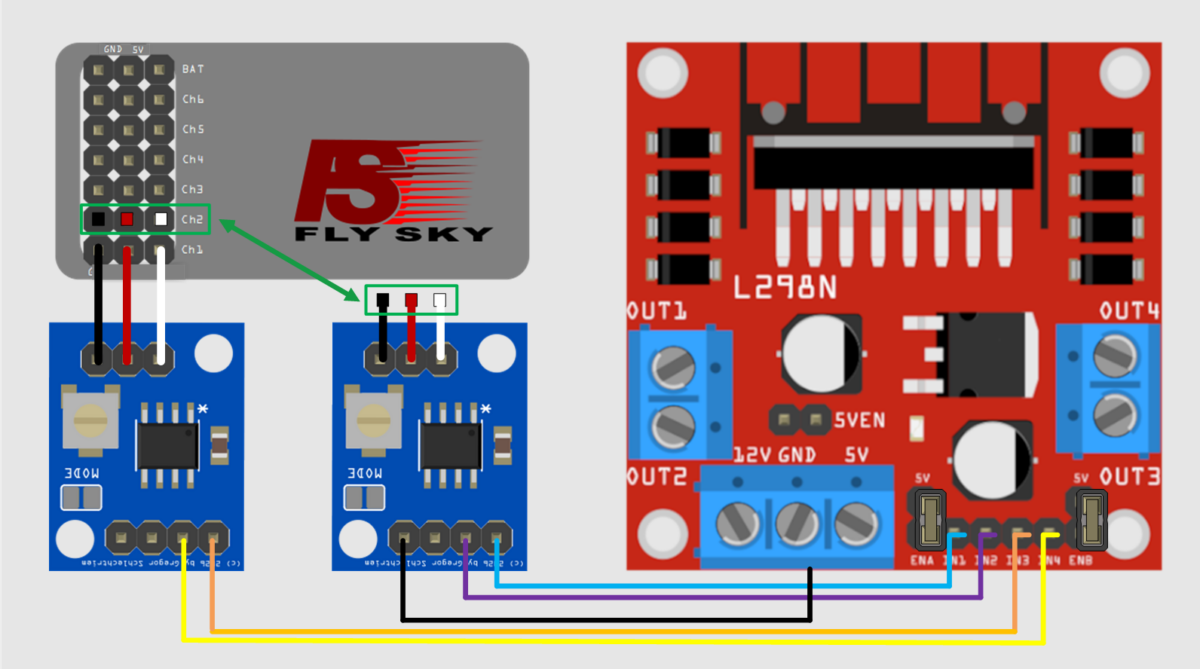
Der RCRX2Bridge II Baustein wird eingangsseitig, wie im Beitragsbild dargestellt, mit dem Empfänger verbunden. Die Eingangspins des Motortreibers IN1 und IN2 werden, wie im Beitragsbild gezeigt, mit den Ausgangspins des Breakout-Boards verbunden. Soll noch ein zweiter Motor angesteuert werden, dann ist dazu ein zweiter RCRX2Bridge II -Baustein erforderlich.
Ansteuerung von Brücken mit drei Eingängen
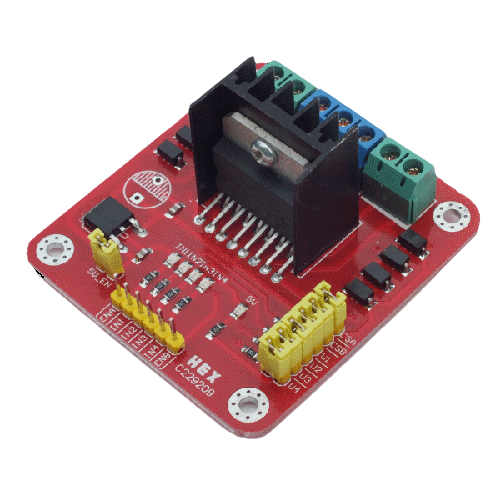
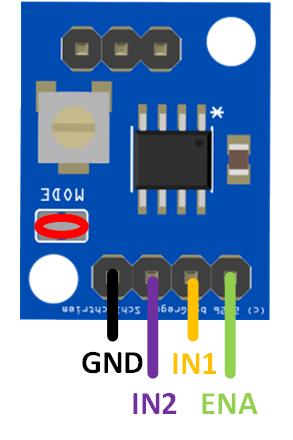 Für diesen Anwendungsfall wird der RCRX2Bridge II Baustein durch eine Lötbrücke bei „MODE“ für die geänderte Logik konfiguriert und dann auch in diesem Fall eingangsseitig, wie im Beitragsbild dargestellt, mit dem Empfänger verbunden.
Für diesen Anwendungsfall wird der RCRX2Bridge II Baustein durch eine Lötbrücke bei „MODE“ für die geänderte Logik konfiguriert und dann auch in diesem Fall eingangsseitig, wie im Beitragsbild dargestellt, mit dem Empfänger verbunden.
Die Eingangspins des Motortreibers ENA, IN1 und IN2 werden wie im Bild rechts gezeigt, mit den Ausgangspins des Breakout-Boards verbunden. Soll noch ein zweiter Motor angesteuert werden, dann ist dazu auch hier ein zweiter RCRX2Bridge II -Baustein erforderlich.
Der Bausatz für das Breakout-Board mit dem RCRX2Bridge II Controller ist im Shop erhältlich.