Benutzen Sie Ihr Android Tablet oder Smartphone als Fernsteuerung: mit Touch-Kommandos oder durch Bewegen des Tablets kann beispielsweise ein Roboter oder ein Modellauto über Bluetooth ferngesteuert werden. Als Basis dient die Android App picCAR, die als Open Source released wurde.
Diese App unterstützt in der aktuellen Version 1.3 nun zusätzlich zur bisherigen Robotersteuerung ( = Richtungsänderung über Geschwindigkeitsänderung der Antriebsmotoren) auch „normale“ Fahrzeuge, bei denen ein Kanal zur Lenkung und ein Kanal zur Geschwindigkeitsregelung verwendet wird.
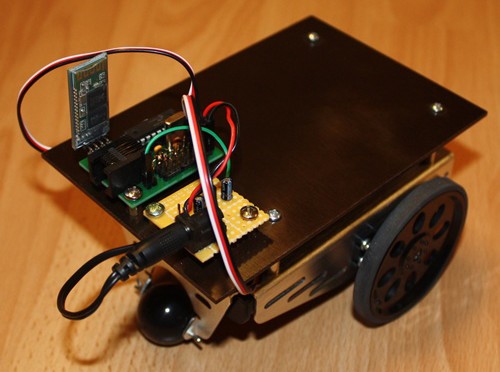
Das Tablet oder Smartphone steuert einen PiKoder/SSC über BlueTooth an. Der Einbau und die Verdrahtung des PiKoder/SSC ist schnell vorgenommen.
Benutzen Sie Ihr Android Tablet oder Smartphone als Fernsteuerung: mit Touch-Kommandos oder durch Bewegen des Tablets kann beispielsweise ein Roboter über Bluetooth ferngesteuert werden. Als Basis dient die Android App picCAR, die als Open Source released wurde. Diese App steuert einen PiKoder/SSC direkt an. Nähere Informationen zum Aufbau des Empfängers finden Sie auf der PiKoder Bluetooth-Fernsteuerseite.
Im Rahmen der Realisierung meiner digitalen OpenSource Bluetooth-Fernsteuerung ergab sich die Anforderung zum Einsatz eines Arduino Bluetooth Shield auf der Senderseite. Da dieser Shield defaultmäßig mit 38400 Baud arbeitet, aber mein Controller 9600 Baud benötigt, musste die Baudrate umgestellt werden. Diese Anpassung wollte ich nur mit einem Arduino vornehmen und keine weiteren Hilfsmittel, wie USB-Serial-Adapter einsetzen – zumal der Arduino bereits die benötigten 3,3 V Betriebsspannung für den Shield zur Verfügung stellt. Der einfachste Weg hierzu ist der Einsatz der USB-Schnittstelle des Arduino selber, da bei dieser Schnittstelle die Baudrate über den Arduino Serial Monitor vom Bediener angepasst werden kann.
Um jegliches „Störfeuer“ an den Digitalpins zu vermeiden, wird der Reset-Eingang des Arduino fest mit GND verbunden und der Controller so „still gelegt“.
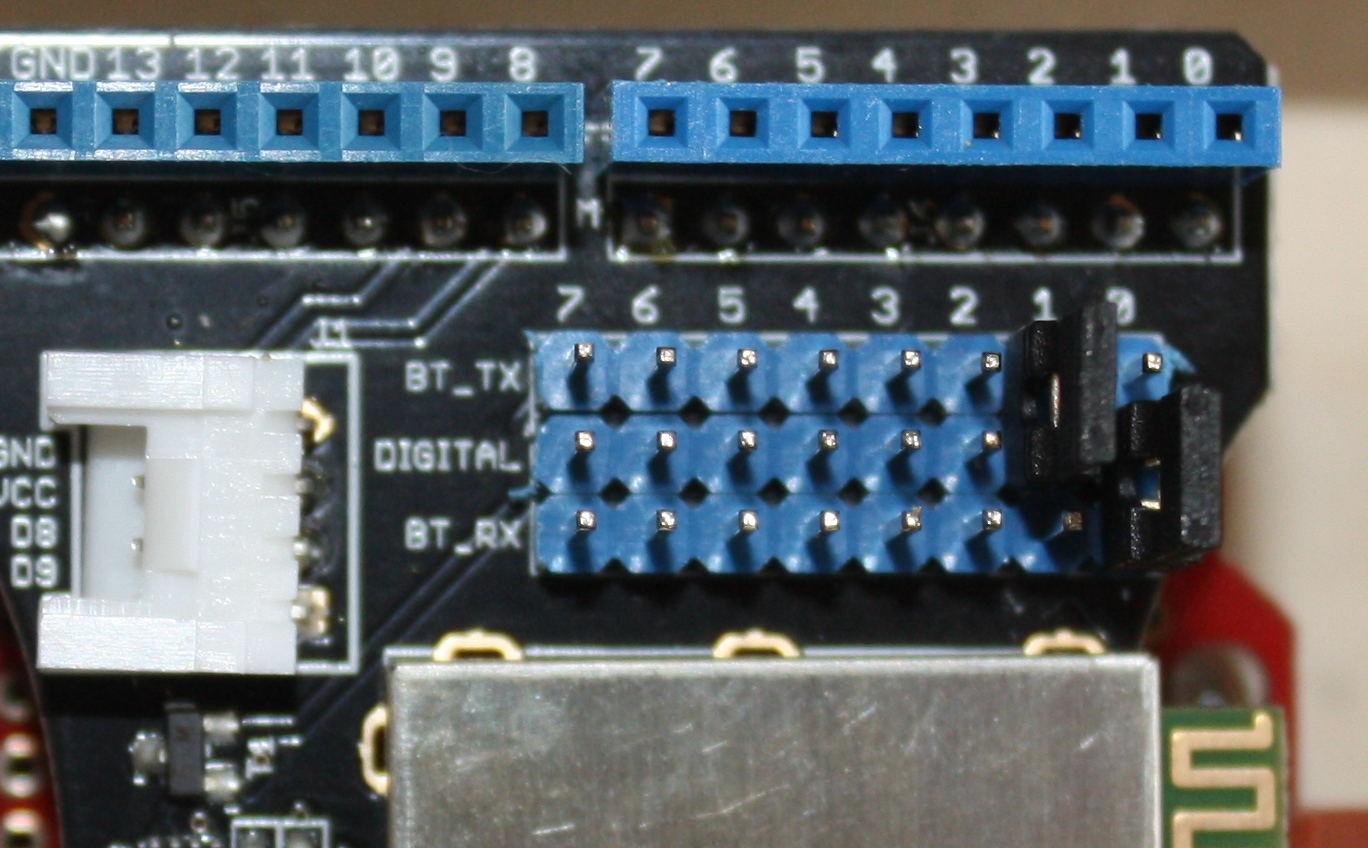
Danach habe ich den Bluetooth Shield aufgesetzt und die Jumperstellung für RX und TX gemäß dem folgenden Bild vorgenommen.
Stellung der Jumper auf dem Bluetooth-Shield
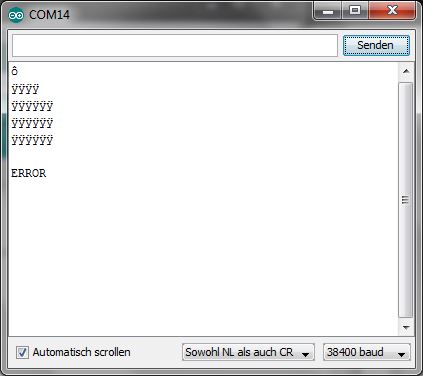
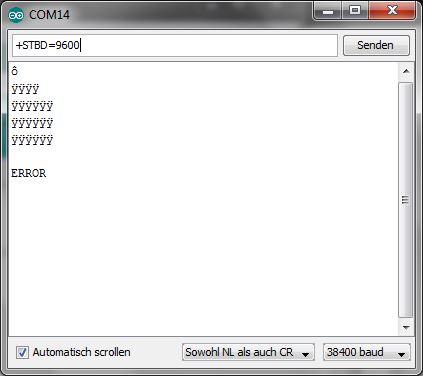
Jetzt wird der Serial Monitor gestartet. Die Baudrate wird auf 38400 eingestellt. Zur Einhaltung des Protokolls ist es außerdem wichtig, dass am Zeilenende sowohl NL als auch CR übertragen werden. Nachdem ich einige leere Zeilen geschickt habe, erschien nach diversen unlesbaren Zeichen die Meldung „ERROR“.
Screen Shot: Beginn der Programmierung
Nun wird die Programmierung durch die Übertragung einer weiteren leeren Zeile (entsprechend NL und CR) gestartet und das Kommando zur Umstellung der Baudrate auf 9600 eingegeben.
Screen Shot 2: Eingabe des Kommandos zur Baudratenumstellung
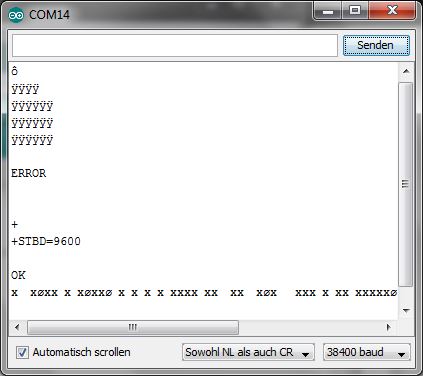
Nach dem Senden wird die erfolgreiche Ausführung mit „OK“ quittiert Die folgenden Statusmeldungen werden mit der neuen Baudrate 9600 ausgegeben und sind daher hier nicht zu lesen.
Screen Shot 3: Quittierung der neuen Baudrate
Zur Überprüfung kann die Baudrate am Serial Monitor nun auf 9600 umgestellt werden. Nach einem Reset des Arduino wird dann ein Kommando eingegeben – ich habe die Baudrate einfach nochmal auf 9600 gestellt – und der Shield meldet sich nun mit einer lesbaren Statusmeldung.
Screen Shot 4: Prüfung der Programmierung mit neuer Baudrate
Damit ist die Programmierung abgeschlossen.
Einwilligung verwalten
Um dir ein optimales Erlebnis zu bieten, verwenden wir Technologien wie Cookies, um Geräteinformationen zu speichern und/oder darauf zuzugreifen. Wenn du diesen Technologien zustimmst, können wir Daten wie das Surfverhalten oder eindeutige IDs auf dieser Website verarbeiten. Wenn du deine Einwilligung nicht erteilst oder zurückziehst, können bestimmte Merkmale und Funktionen beeinträchtigt werden.
Funktional
Immer aktiv
Die technische Speicherung oder der Zugang ist unbedingt erforderlich für den rechtmäßigen Zweck, die Nutzung eines bestimmten Dienstes zu ermöglichen, der vom Teilnehmer oder Nutzer ausdrücklich gewünscht wird, oder für den alleinigen Zweck, die Übertragung einer Nachricht über ein elektronisches Kommunikationsnetz durchzuführen.
Präferenzen
Die technische Speicherung oder der Zugriff ist für den rechtmäßigen Zweck der Speicherung von Präferenzen erforderlich, die nicht vom Abonnenten oder Benutzer angefordert wurden.
Statistiken
Die technische Speicherung oder der Zugriff, der ausschließlich zu statistischen Zwecken erfolgt.Die technische Speicherung oder der Zugriff, der ausschließlich zu anonymen statistischen Zwecken verwendet wird. Ohne eine Vorladung, die freiwillige Zustimmung deines Internetdienstanbieters oder zusätzliche Aufzeichnungen von Dritten können die zu diesem Zweck gespeicherten oder abgerufenen Informationen allein in der Regel nicht dazu verwendet werden, dich zu identifizieren.
Marketing
Die technische Speicherung oder der Zugriff ist erforderlich, um Nutzerprofile zu erstellen, um Werbung zu versenden oder um den Nutzer auf einer Website oder über mehrere Websites hinweg zu ähnlichen Marketingzwecken zu verfolgen.