Der vorherige Blog hat beschrieben, wie der ursprünglich verwendete Fernsteuersender durch ein iRangeX Multiprotokoll-Modul ersetzt und der gesamte Aufbau vereinfacht werden kann.
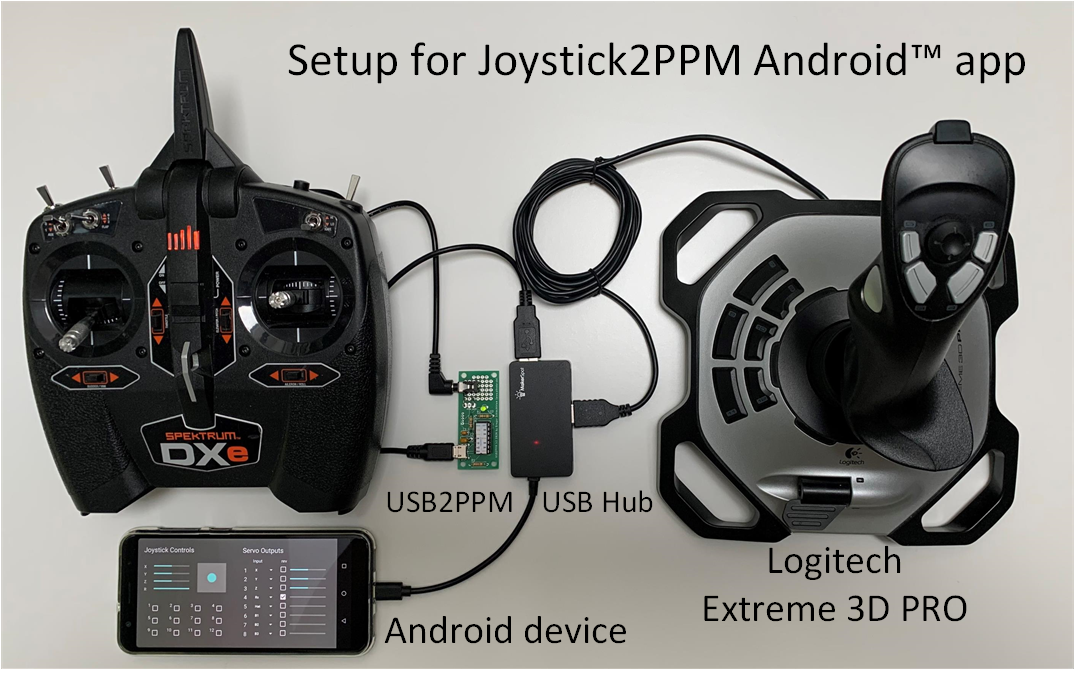
In diesem Blog wird nun ein noch kompakterer Aufbau beschrieben, bei dem der USB Hub, der USB2PPM PiKoder und das Multiprotokoll-Modul mechanisch zu einer Einheit zusammengefasst werden, die dann nur noch mit dem Smart Device und dem Joystick verbunden werden muss.
Zur Realisierung sind folgende Schritte erforderlich:
-
- Kabel USB – Hub verlängern
- USB2PPM PiKoder mit USB-Stecker modifizieren
- Baugruppenträger realisieren
- Module montieren und verdrahten
Kabel USB – Hub verlängern
Die gängigen USB OTG Hubs (on the go) haben in der Regel ein sehr kurzes Anschlusskabel (0,1 – 0,15 m). Im praktischen Einsatz ergeben sich hierdurch Einschränkungen, da der Hub so immer in der Nähe des Smart Devices sein muss und möglicherweise neben dem Halter in der Luft hängt und so eine „starre Verbindung“ mit dem PiKoder nicht möglich ist.
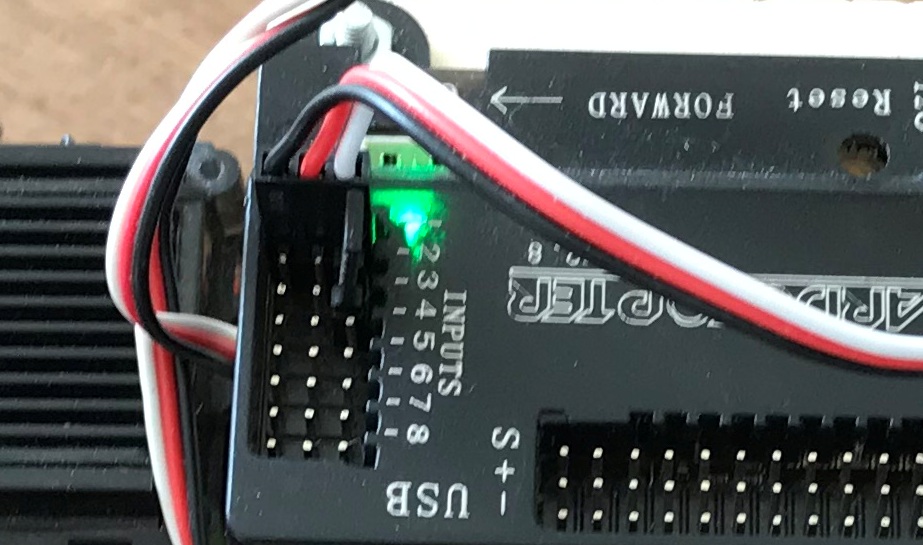
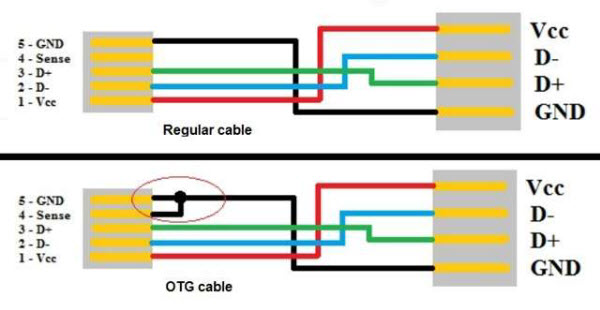
Die Verlängerung des Anschlusskabels stellt kein Problem dar. Es ist lediglich zu beachten, dass als Stecker weiterhin ein OTG-Stecker mit entsprechender Kodierung (s. Bild) zum Einsatz kommt, weil der Hub ansonsten nicht erkannt und mit Spannung versorgt wird.
Die Verlängerung lässt sich am einfachsten realisieren, indem ein Stück USB-Kabel der gewünschten Länge an die Hub-Platine angelötet wird und am anderen Ende der vorhandene Stecker mit dem kurzen Kabelende angebracht und mit Schrumpfschlauch fixiert wird.
USB2PPM PiKoder mit USB-Stecker modifizieren
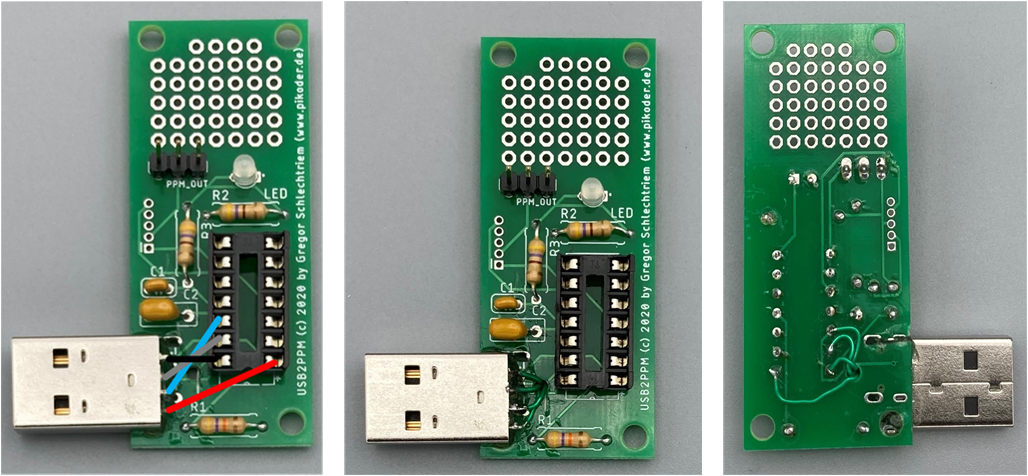
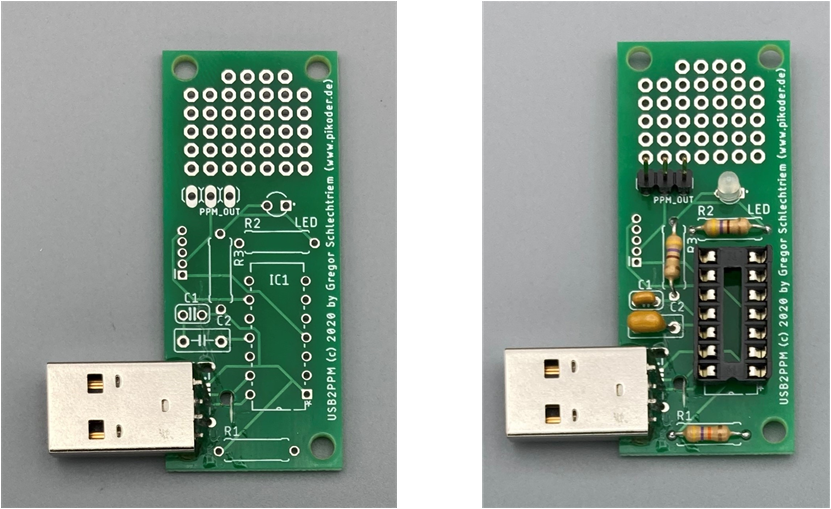
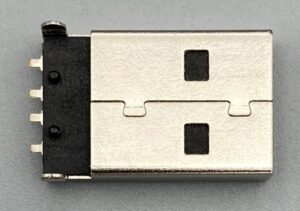 Für die direkte Verbindung zwischen USB Hub und PiKoder benötigt der USB2PPM einen USB Stecker (s. Bild rechts) anstelle der normalen USB Micro-Buchse. Damit der Stecker montiert werden kann, sägen Sie die Leiterplatte ein um dann die Befestigungslaschen durchstecken zu können. Zusätzlich ist eine Bohrung erforderlich, um die Anschlusskabel des Steckers verdrahten zu können (s. Bild unten).
Für die direkte Verbindung zwischen USB Hub und PiKoder benötigt der USB2PPM einen USB Stecker (s. Bild rechts) anstelle der normalen USB Micro-Buchse. Damit der Stecker montiert werden kann, sägen Sie die Leiterplatte ein um dann die Befestigungslaschen durchstecken zu können. Zusätzlich ist eine Bohrung erforderlich, um die Anschlusskabel des Steckers verdrahten zu können (s. Bild unten).
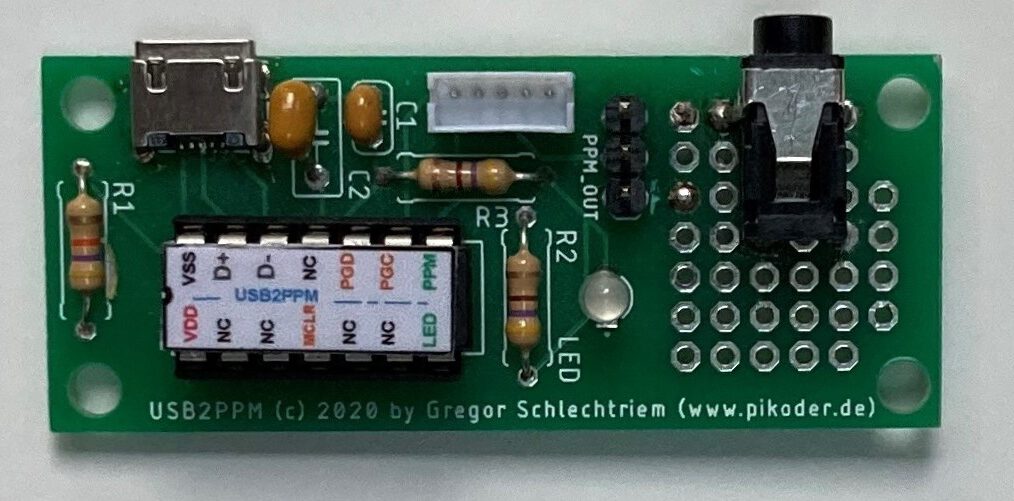
 Danach kleben Sie den Stecker mit Zweikomponentenkleber auf die Leiterplatte und bestücken die Leiterplatte mit den übrigen Bauteilen (s. Bilder unten). Hinweis: im weiteren Verlauf des Projektes habe ich den dreipoligen Header durch einen Molex-Verbinder ersetzt.
Danach kleben Sie den Stecker mit Zweikomponentenkleber auf die Leiterplatte und bestücken die Leiterplatte mit den übrigen Bauteilen (s. Bilder unten). Hinweis: im weiteren Verlauf des Projektes habe ich den dreipoligen Header durch einen Molex-Verbinder ersetzt.
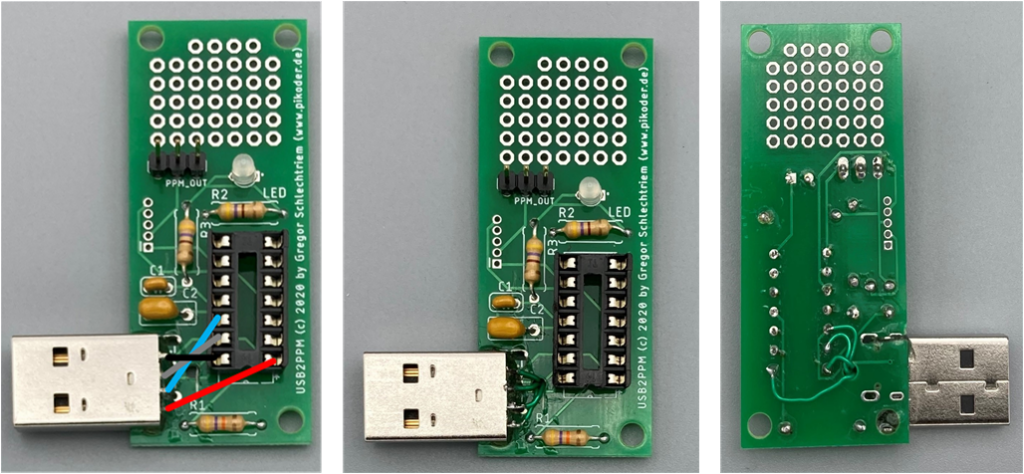
Zum Schluss verbinden Sie nun noch die Pins des USB Steckers mit den entsprechenden PiKoder Pins; hierzu wird ein dünner, isolierter Draht verwendet. Das folgenden Bilder zeigen die schematische Verbindung und danach sehen Sie die konkrete Ausführung auf der Platinenunterseite.
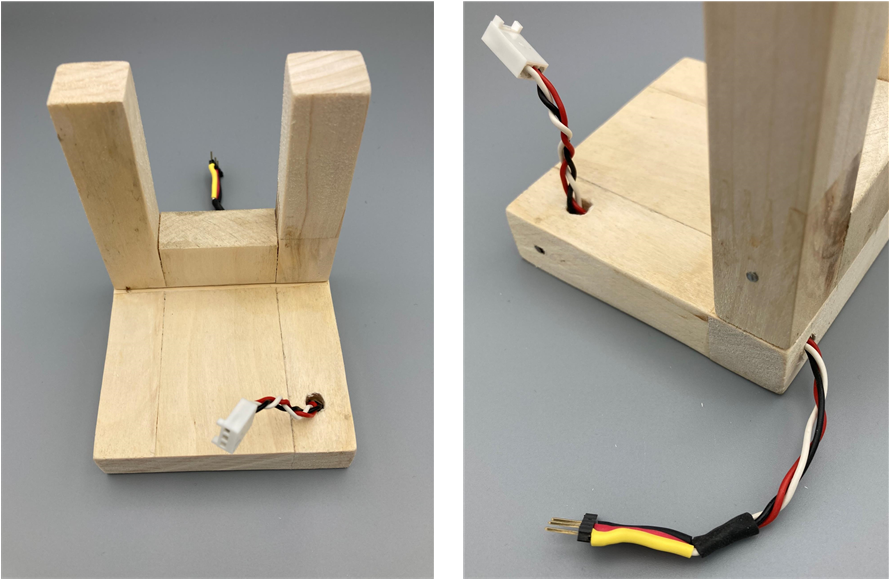
Baugruppenträger realisieren
Der Baugruppenträger besteht aus einer einfachen gewinkelten Holzkonstruktion. Die quadratische Grundplatte von 85 mm Seitenlänge nimmt den Hub und den USB2PPM Pikoder auf. Das Multiprotokollmodul wird in der senkrechten Gabel eingeklemmt. Zur optischen Verbesserung der Kabelführung habe ich einen entsprechenden Kanal gebohrt.
Module montieren und verdrahten
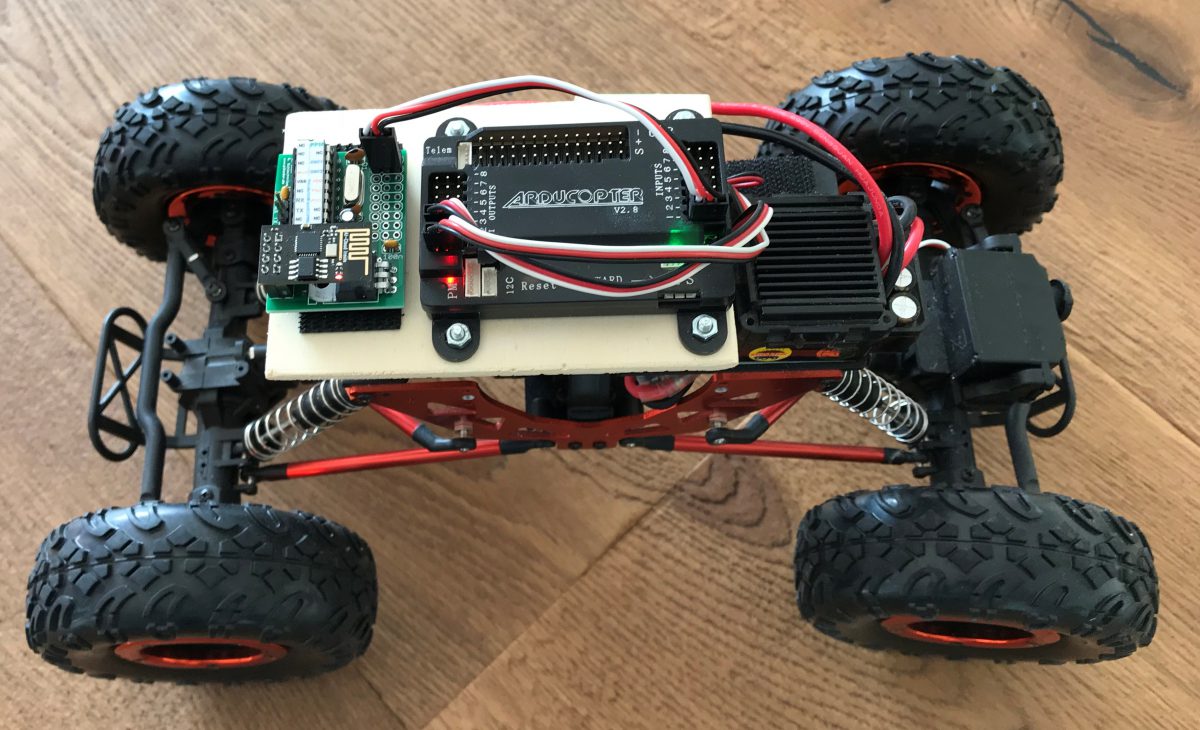
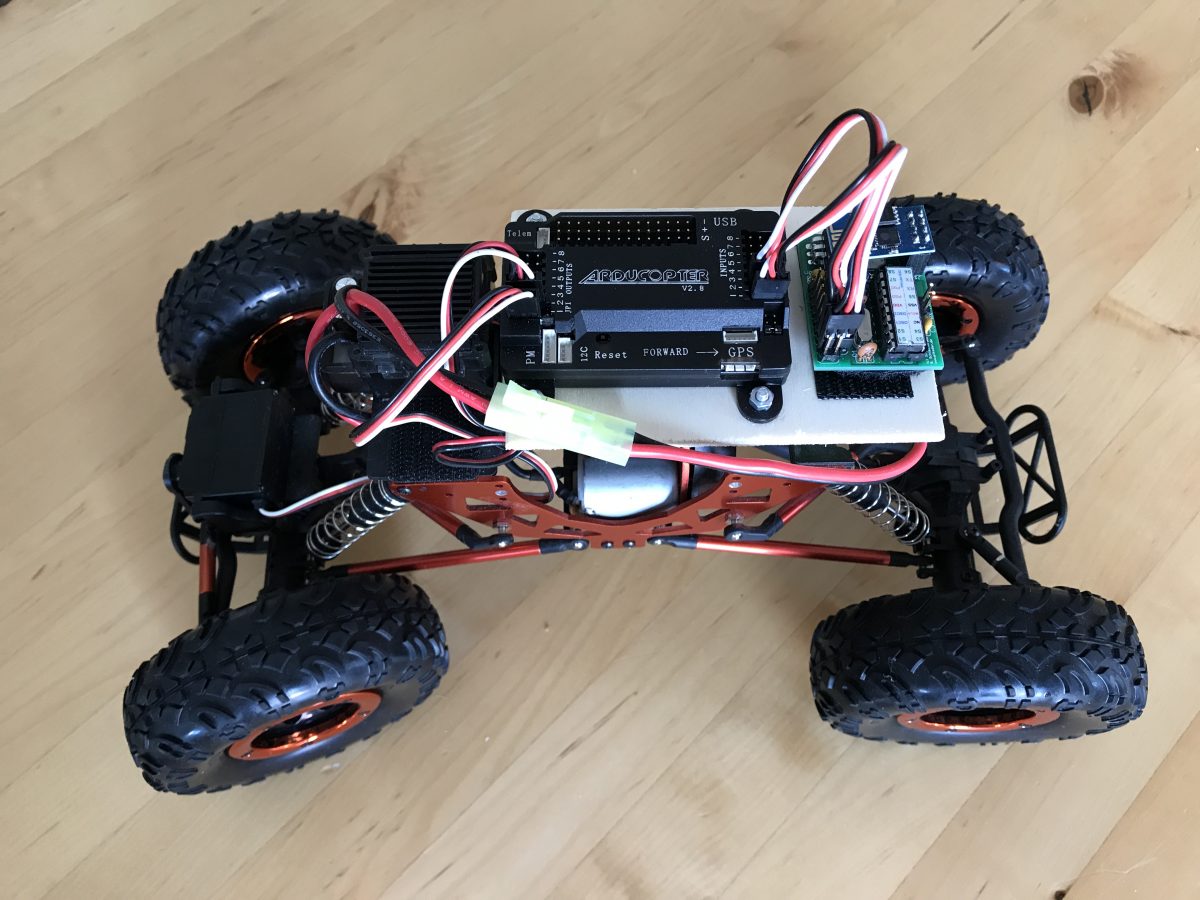
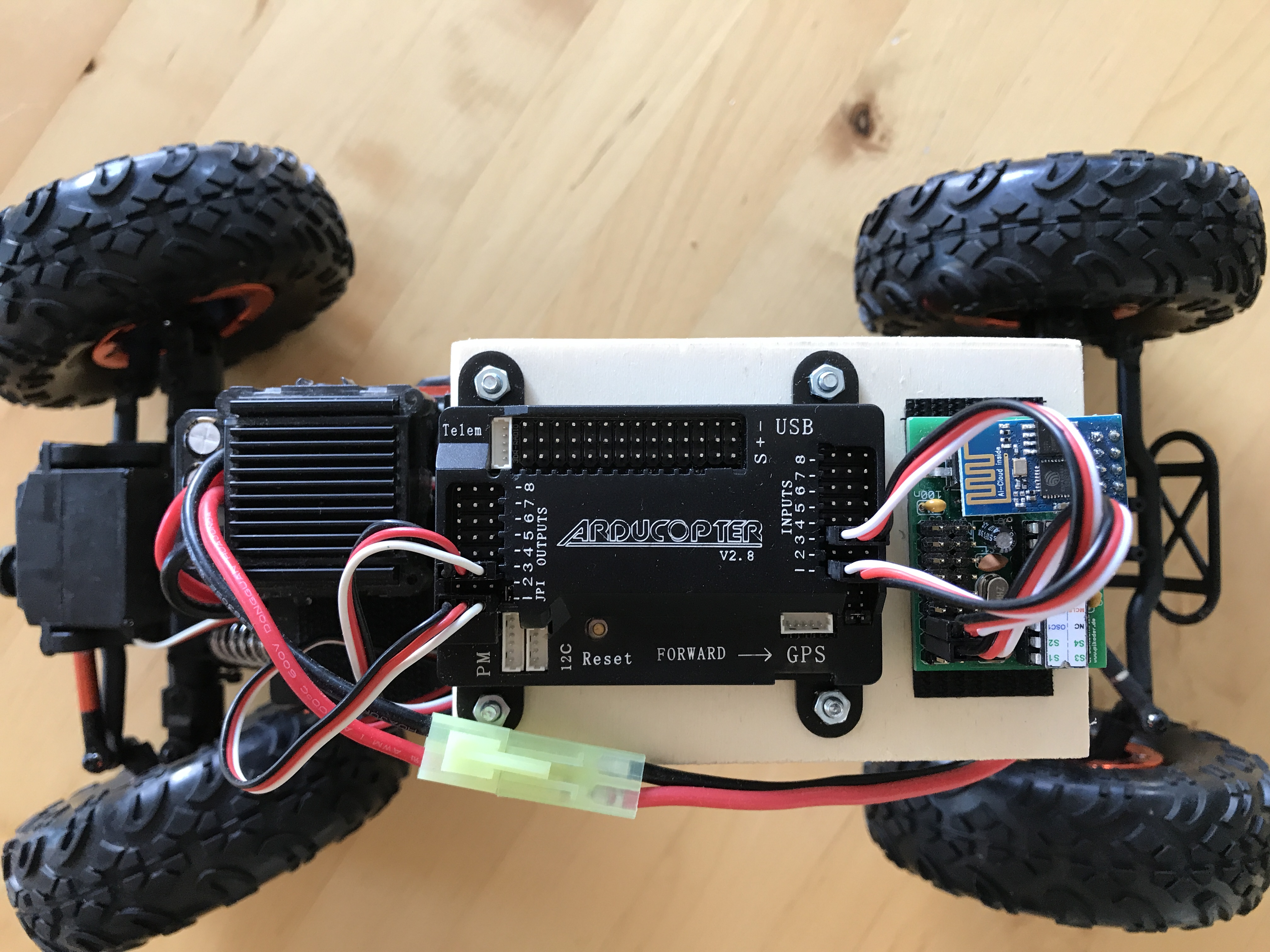
Auf den folgenden Bildern sehen Sie den kompletten Aufbau. Der Hub wird mit doppelseitigem Klebeband fixiert, der USB2PPM PiKoder eingesteckt und mit Schrauben durch die beiden vorderen Befestigungslöcher fixiert. Hierbei verwenden Sie am besten einige Unterlagscheiben als Abstandhalter, damit sich die Leiterplatte nicht verbiegt.
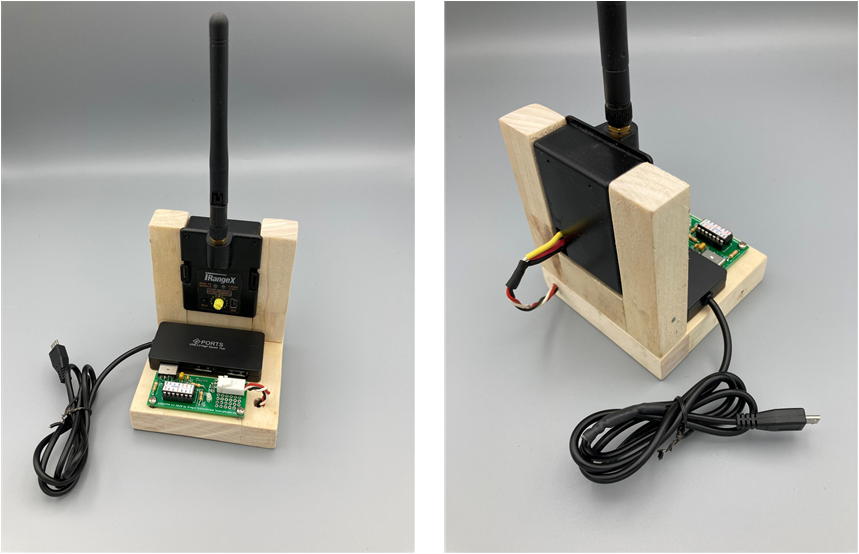
Mit dem Micro USB Stecker ist der „Kompakt-Sender“ zunächst für den Anschluss an ein Android Device vorgesehen. Mit einem kleinen Adapter, z.B. von Micro USB auf USB C-Stecker kann der Sender natürlich problemlos mit einem Surface Notebook verbunden werden.