Überblick
Dieser Blog beschreibt die Umrüstung eines Schuco Speed-Buggy von traditioneller Fernsteuerung auf eine Smartphone-Fernsteuerung mit einem PiKoder/SSC wRX. Obwohl diverse Schritte Buggy-spezifisch sind, lässt sich trotzdem die Vorgehensweise für den Umbau eines beliebigen Fernsteuermodells ableiten.
Meine Idee war, den Empfängerteil der Fernsteuerung still zu legen und die Kanalimpulse des neuen Smartphone-Empfängers am Ausgang des Kanal-Decoders – einzuspeisen, so dass sich die mechanischen und elektrischen Umbauten des Buggy auf ein Minimum beschränken.
Der von mir dann auf ebay als defekt erworbene Buggy hatte leider ausgerechnet eine nicht funktionierende Empfänger-Leiterplatte, so dass ich den Buggy entgegen meiner Planung auch mechanisch und elektrisch umbauen musste.
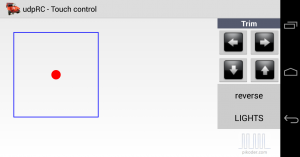
Vom Umbau hat aber auch meine Smartphone App udpRC deutlich profitiert: für den Lenk-Kanal gibt es jetzt eine Richtungsumkehr (reverse) und für beide Kanäle wird eine Trimfunktion angeboten. Und schließlich habe ich noch einen Schaltkanal (LIGHTS) realisiert, damit ich, wie in der Originalkonfiguration, auch die Scheinwerfer ein- und ausschalten kann.
Hinweis: Ich habe geplant, die Buggy-Leiterplatte noch weiter zu analysieren, zu reparieren und dann den Anschluss des Smartphone Empfängers an die Leiterplatte in einem weiteren Blog zu beschreiben.
Mechanische und elektrische Umbauten
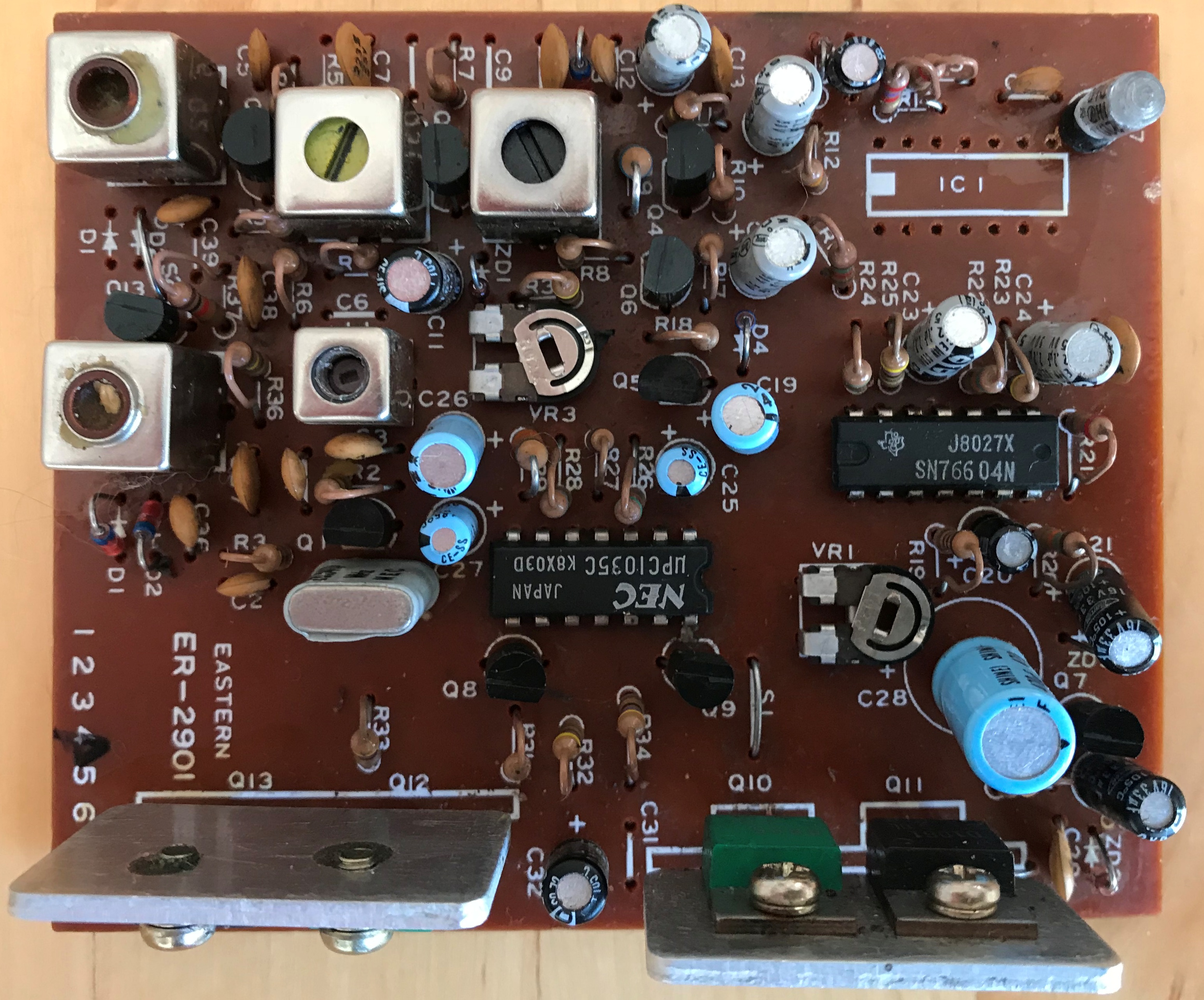
Bestandsaufnahme und Funktion der Originalfernsteuerung
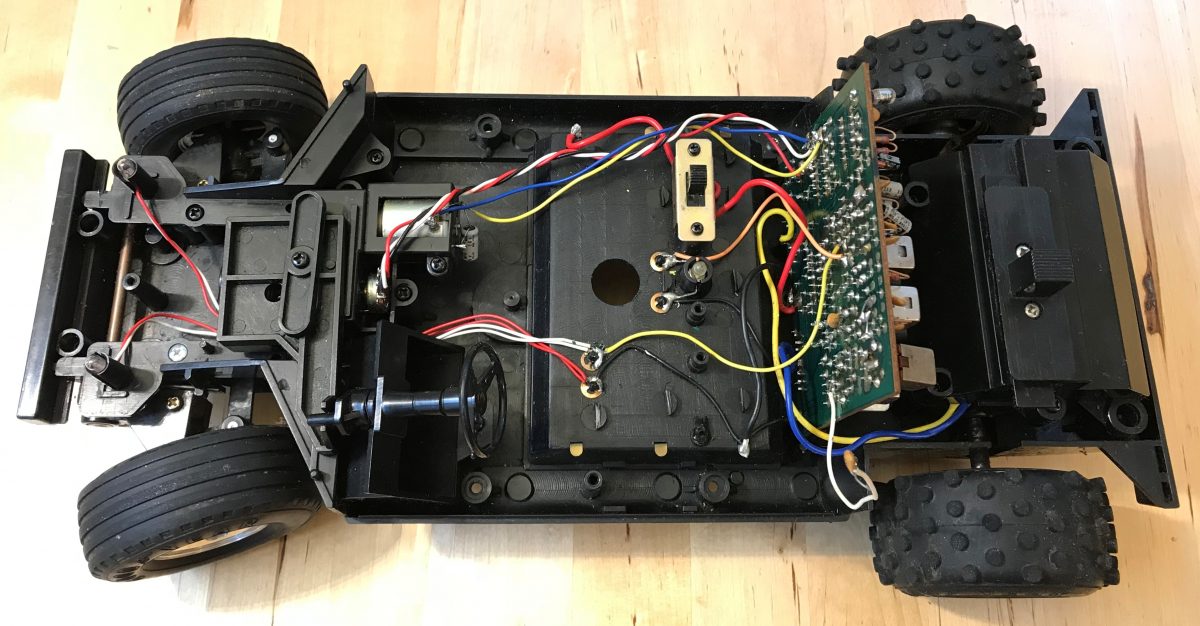
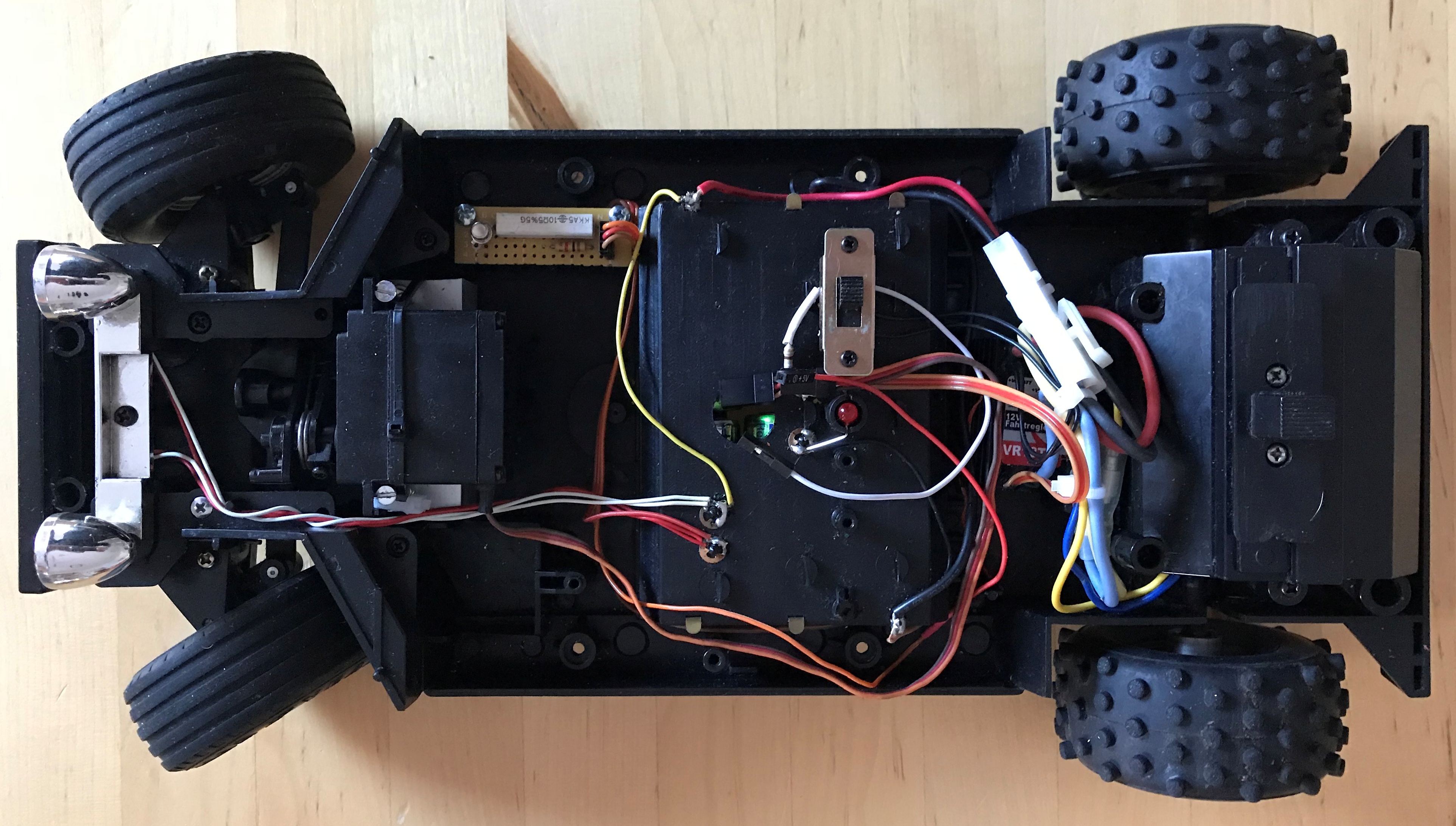
Das folgende Bild zeigt die Ausgangssituation des Buggy.

Die Ansteuerung des Antriebsmotors erfolgt traditionell über eine Brückenschaltung. Ein Standard-Fahrtregler kann diese Aufgabe ohne weitere Anpassungen übernehmen (und hat den Vorteil, dass die Spannungsversorgung des Empfängers in der Regel durch eine BEC-Funktion (Battery Eliminatior Circuit) bereit gestellt wird).
Das Lenkservo ist diskret aufgebaut: es wird nicht nur der Motor angesteuert, sondern auch ein Poti zur Auswertung der Position eingelesen. Da diese Logik nicht ohne größeren Aufwand nachzubilden ist, habe ich mich entschlossen, das diskret aufgebaute Servo komplett durch ein Fernsteuerservo zu ersetzen. Ein Graupner-Servo aus meiner Bastelkiste hat mechanisch perfekt gepasst.
Das Schalten der Scheinwerfer erfolgt interessanterweise nicht über den im Dekoderbaustein enthaltenen Schaltausgang, sondern wird diskret über die Auswertung der Kanalimpulslänge realisiert. Auch hier habe ich davon abgesehen, die vorhandene Logik nachzubilden und statt dessen für die Scheinwerfer die optionale Schaltfunktion des PiKoder/SSC wRX vorgesehen und eine einfache Treiberschaltung auf einer Prototypleiterplatte aufgebaut.
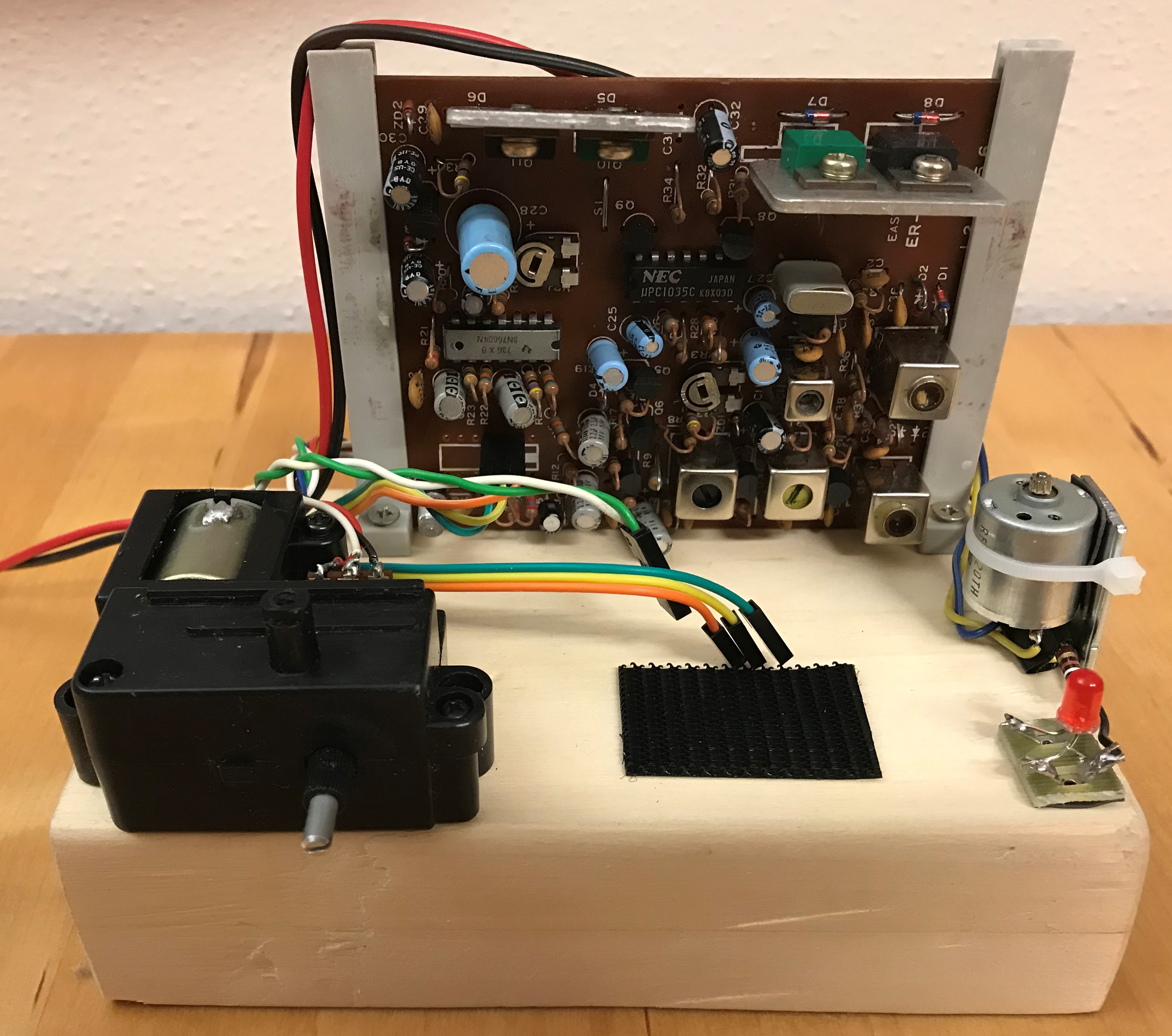
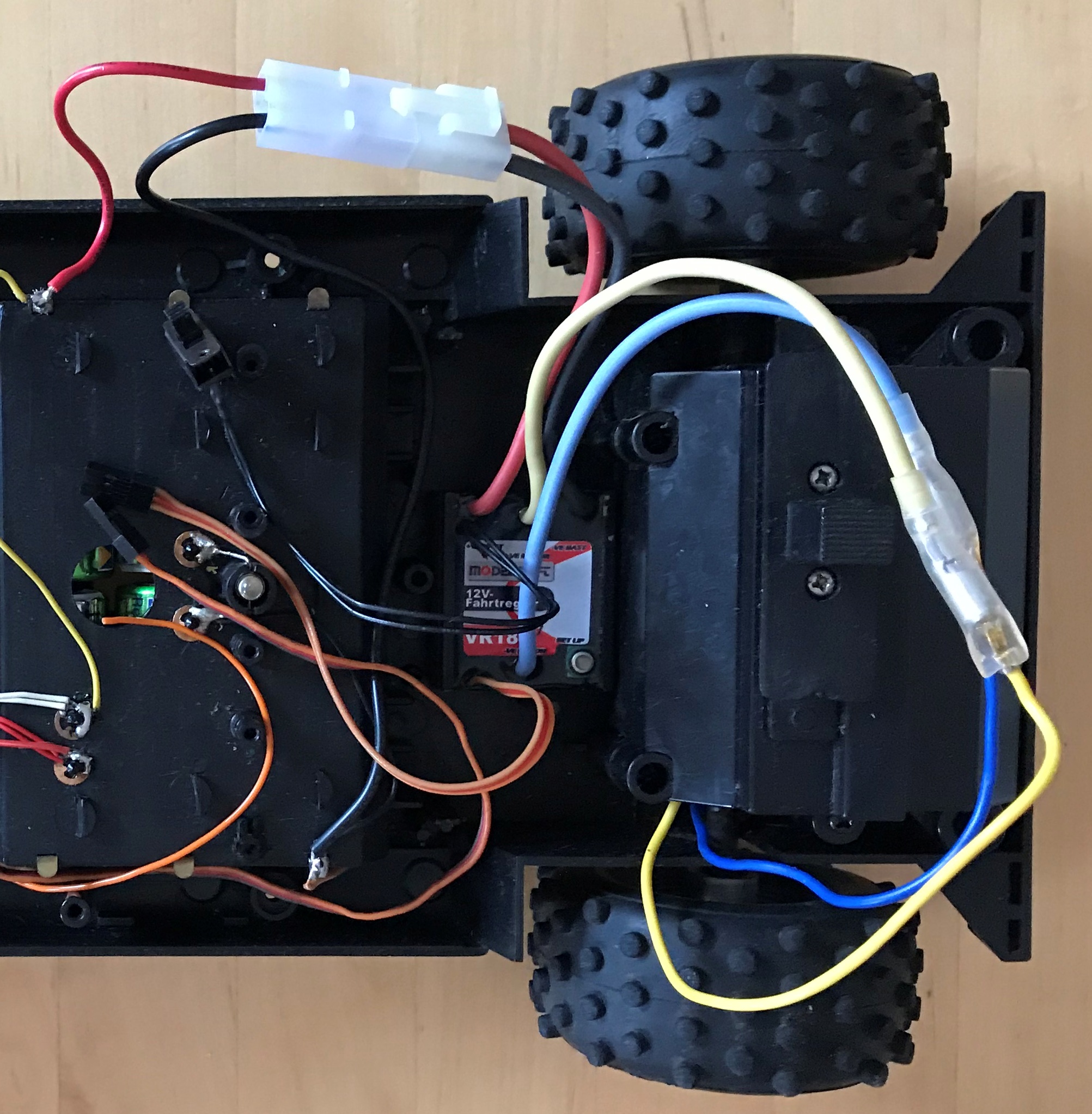
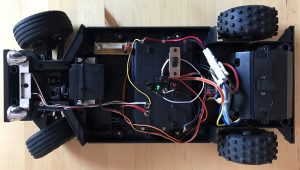
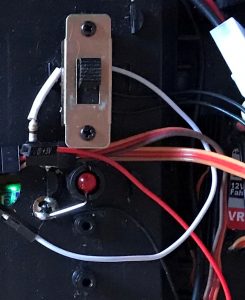
Das folgende Bild zeigt den modifizierten Aufbau.
Details zum Umbau
Einbau des Fahrtreglers
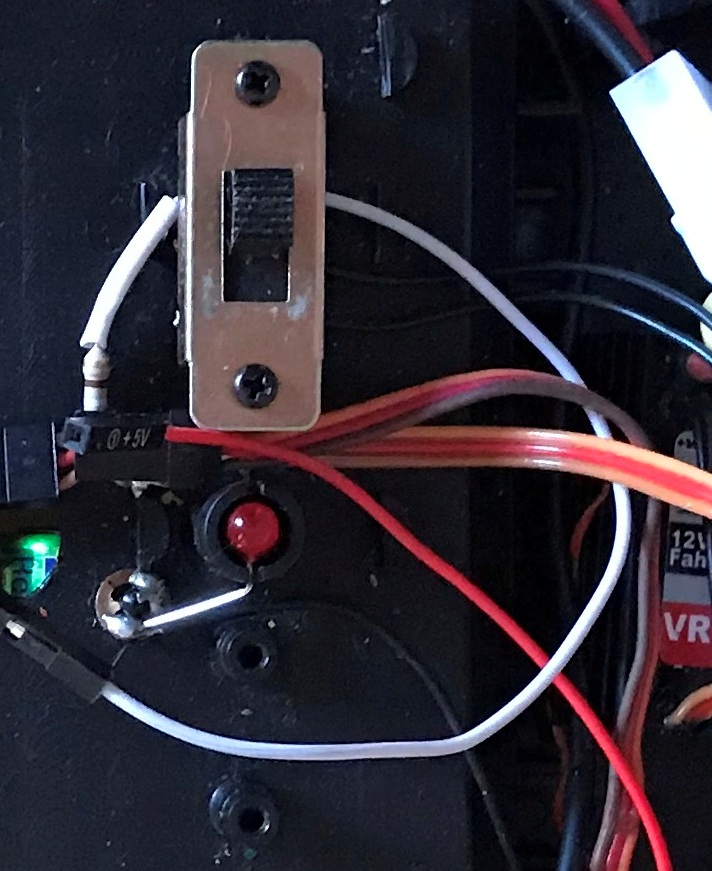
Das nächste Bild zeigt den Einbau des Fahrtreglers.
Der gewählte Fahrtregler passt mechanisch zwischen die Plastikstehbolzen vor der Motor-/Getriebeeinheit. Den zum Regler gehörigen Schalter (im Bild noch vorhanden) habe ich durch den Originalschalter des Buggy ersetzt, der dann wieder an der ursprünglichen Position eingesetzt wird.
Beleuchtung
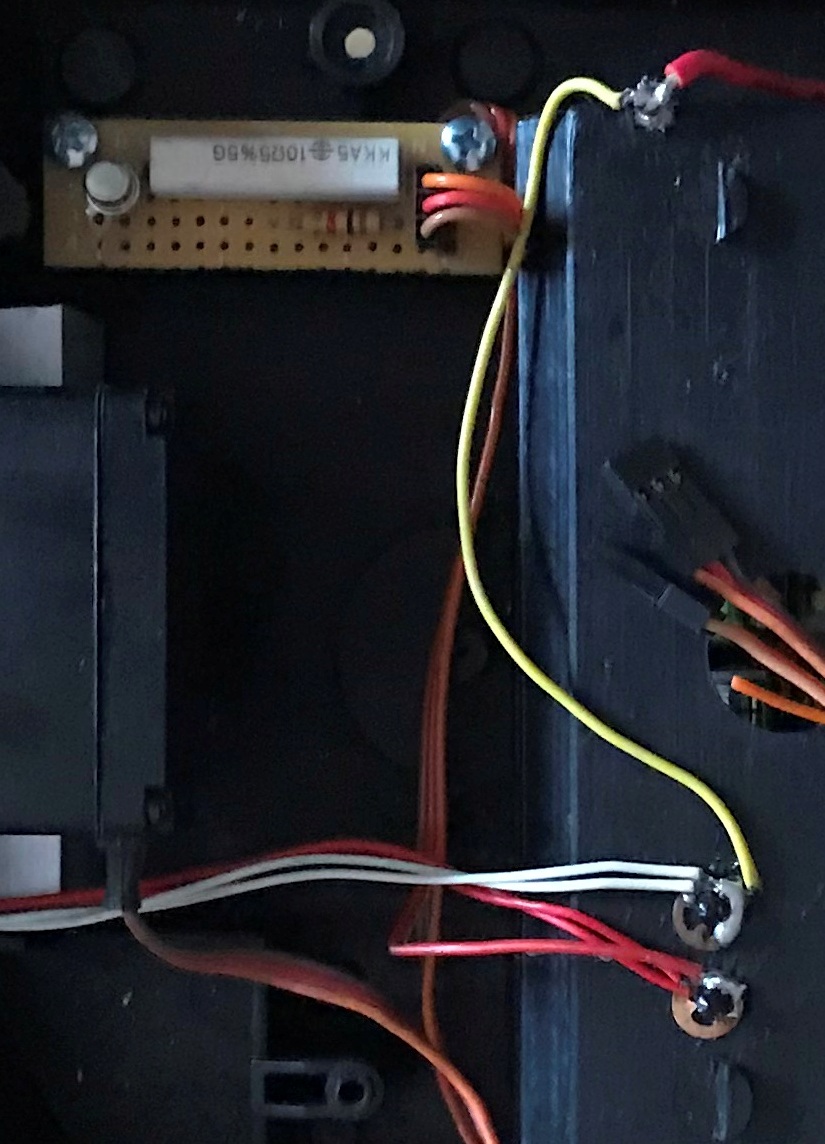
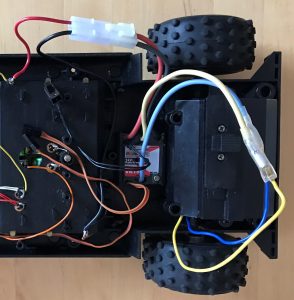
Die Ansteuerung der Beleuchtung erfolgt durch eine kleine Treiberschaltung (im folgenden Bild sichtbar auf Prototypleiterplatte).

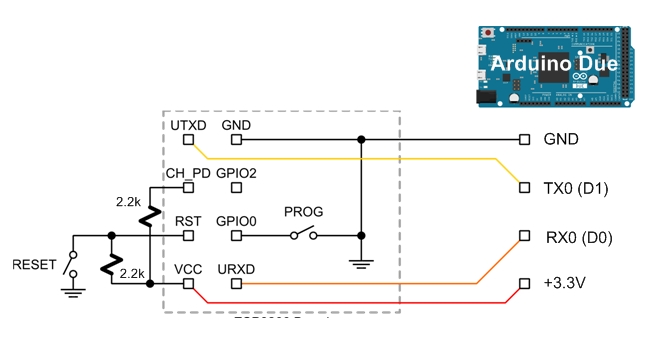
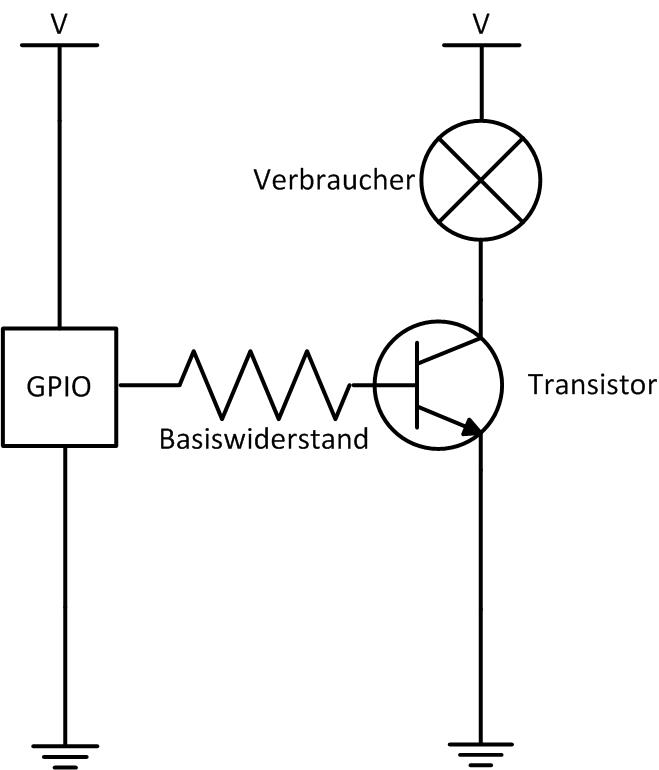
Die Schaltung ist denkbar einfach:
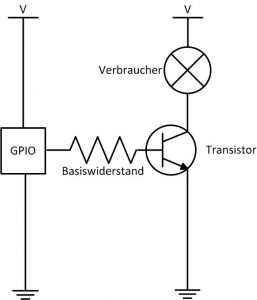
Als Schalttransistor habe ich einen 2N2222 mit einem Basiswiderstand von 1k verwendet. Weiterhin ist im Bild ein Hochlastwiderstand von 10R erkennbar, den ich in Reihe mit den Glühbirnen geschaltet habe (ich habe keine Angaben zu den Glühbirnen gefunden und da die Glühbirnen von der Buggy-Leiterplatte aus mit 6V angesteuert werden, ich aber eine direkte Verbindung zu den Akkus ( 6 x 1,2 V = 7,2 V) hergestellt habe, will ich so die Lebensdauer der Glühbirnen verlängern).
Da die Treiberschaltung die Glühbirnen im Gegensatz zur ursprünglichen Aufbau nun gegen Masse schaltet, mußte ich die Verkabelung der Beleuchtung ändern (schwarzes Kabel entfernt und gelbes Kabel verlegt).
Weitere umbauten und hinweise
Die vorhandene Kontrolllampe habe ich durch eine rote LED mit einem Vorwiderstand ersetzt, weil die Versorgung über den BEC erfolgt und ich den Leistungsbedarf minimieren wollte, um ggf. später noch andere Erweiterungen durchführen zu können (weißes Kabel im Bild).
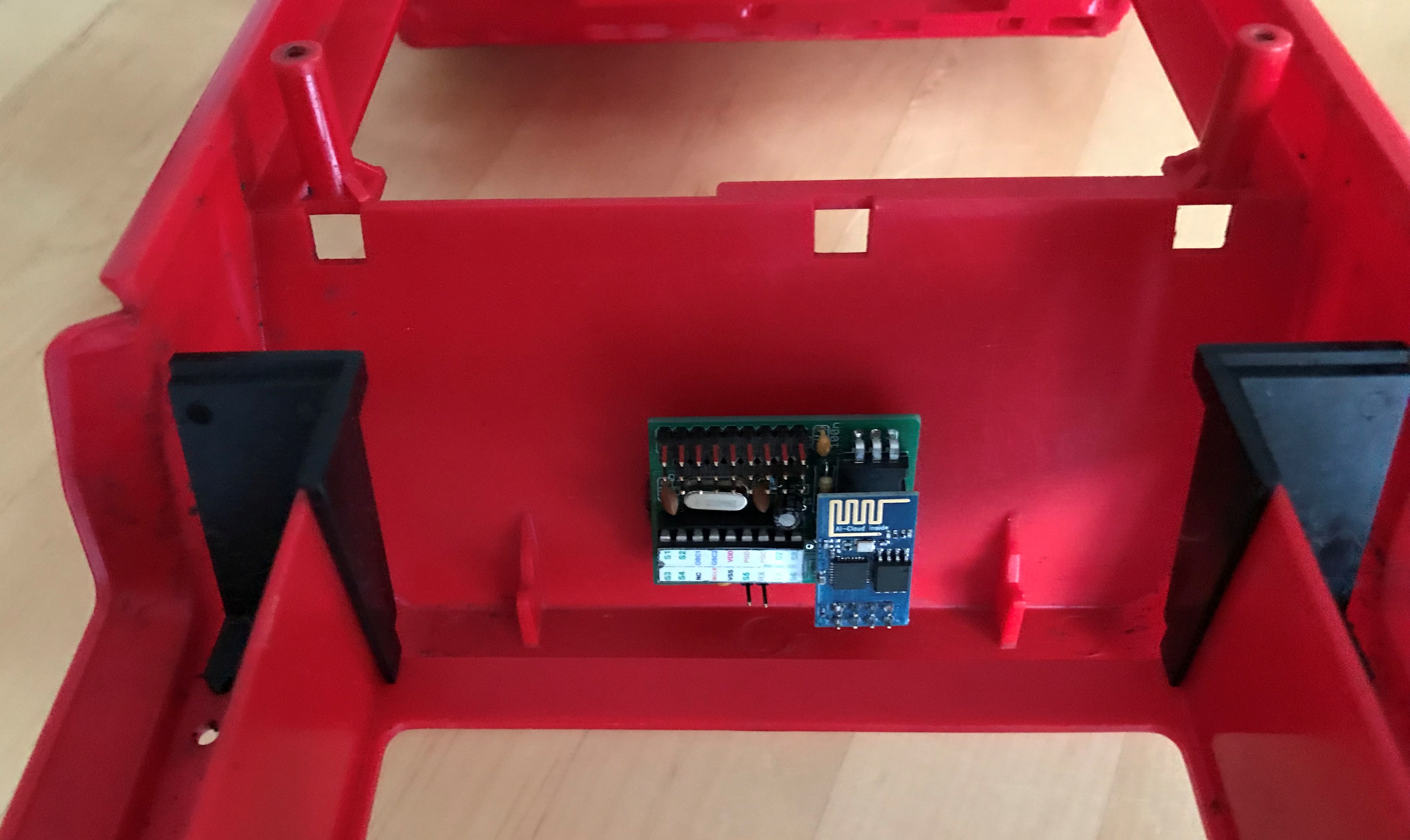
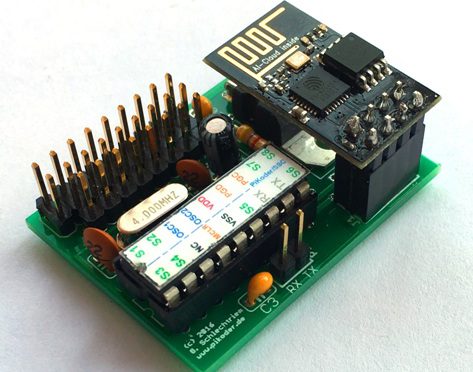
Einbau des Empfängers PiKoder/SSC wRX
Mit dem Entfall der Original-Leiterplatte konnte ich den Empfänger mit Leichtigkeit in den entstandenen Raum einbauen; die Befestigung erfolgte mit Klettband.

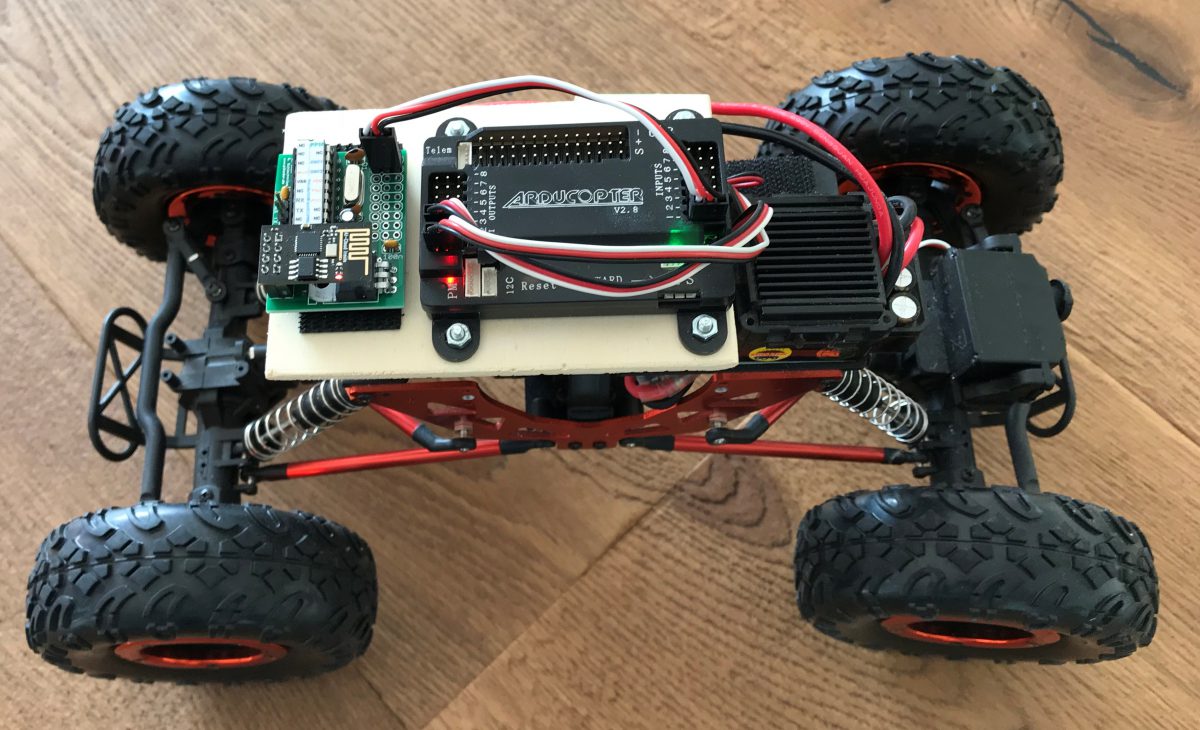
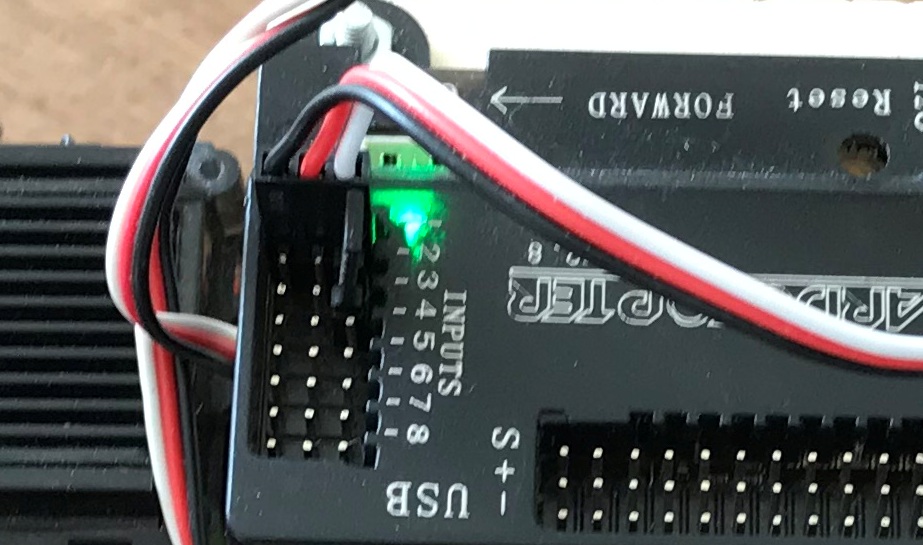
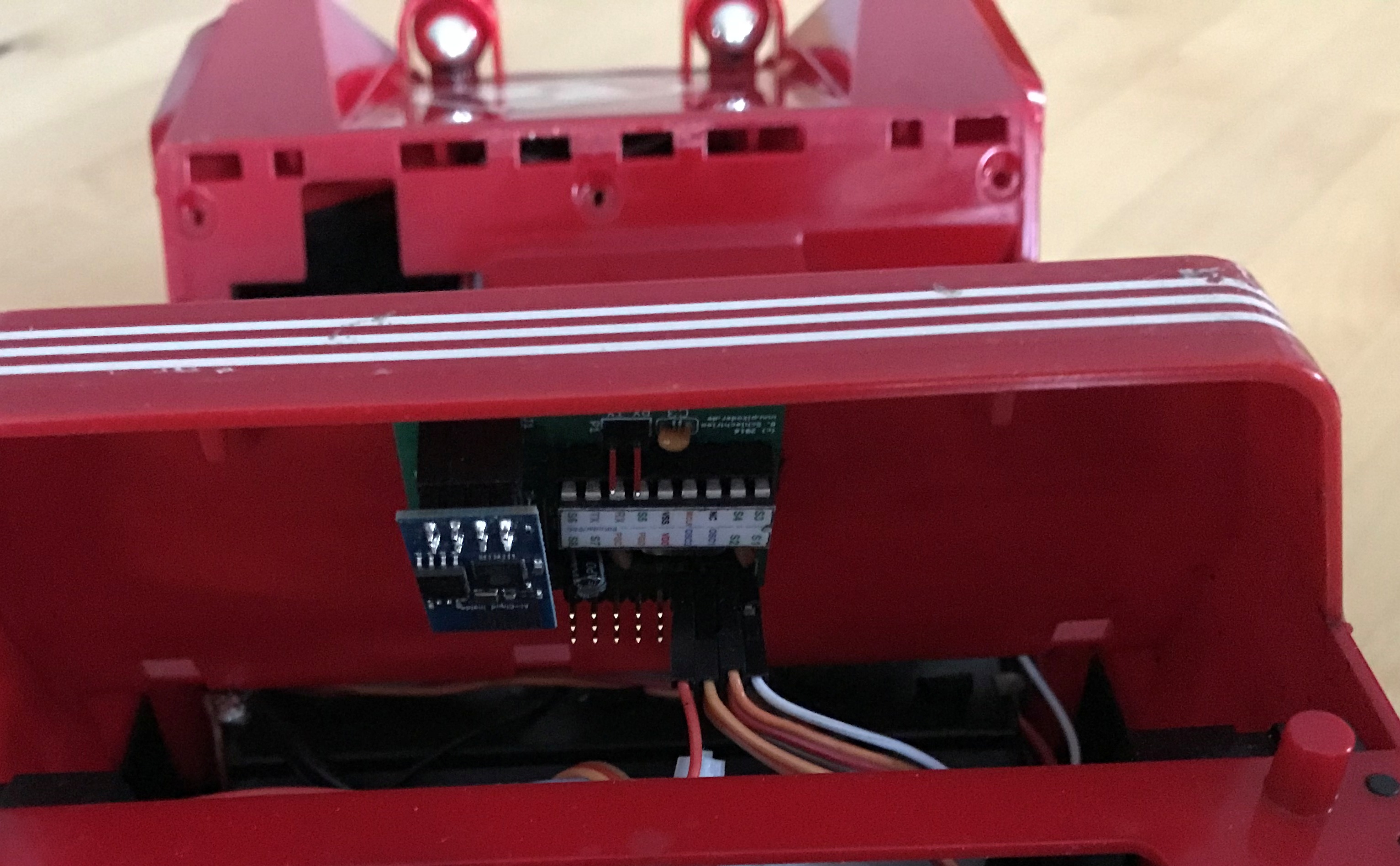
Die Karosserie wird dann aufgesetzt und die Kabel von den Servos, der Lichtansteuerung und der Kontrolllampe werden, wie im nachfolgenden Bild zu sehen, aufgesteckt.

Die Reihenfolge der Kabel lautet von links nach rechts: Eingang Lichtsteuerung (rotes Kabel auf Kanalpin, Fahrtregler, Lenkservo und Kontrolllampe (weißes Kabel auf Pluspol der Spannungsversorgung des PiKoder/SSC wRX aufstecken).
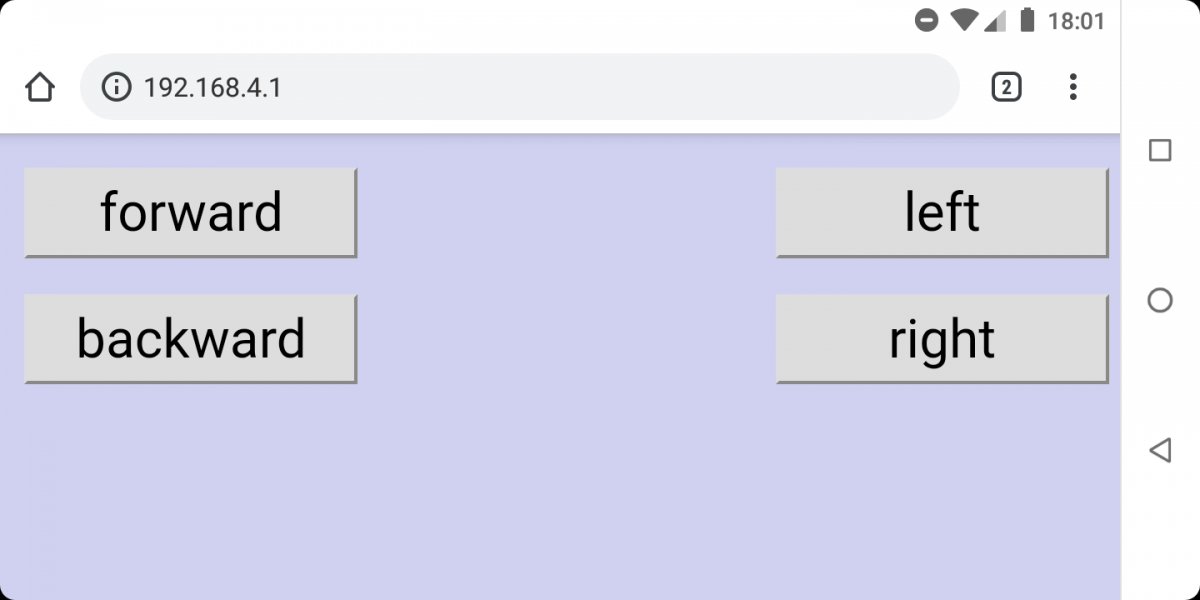
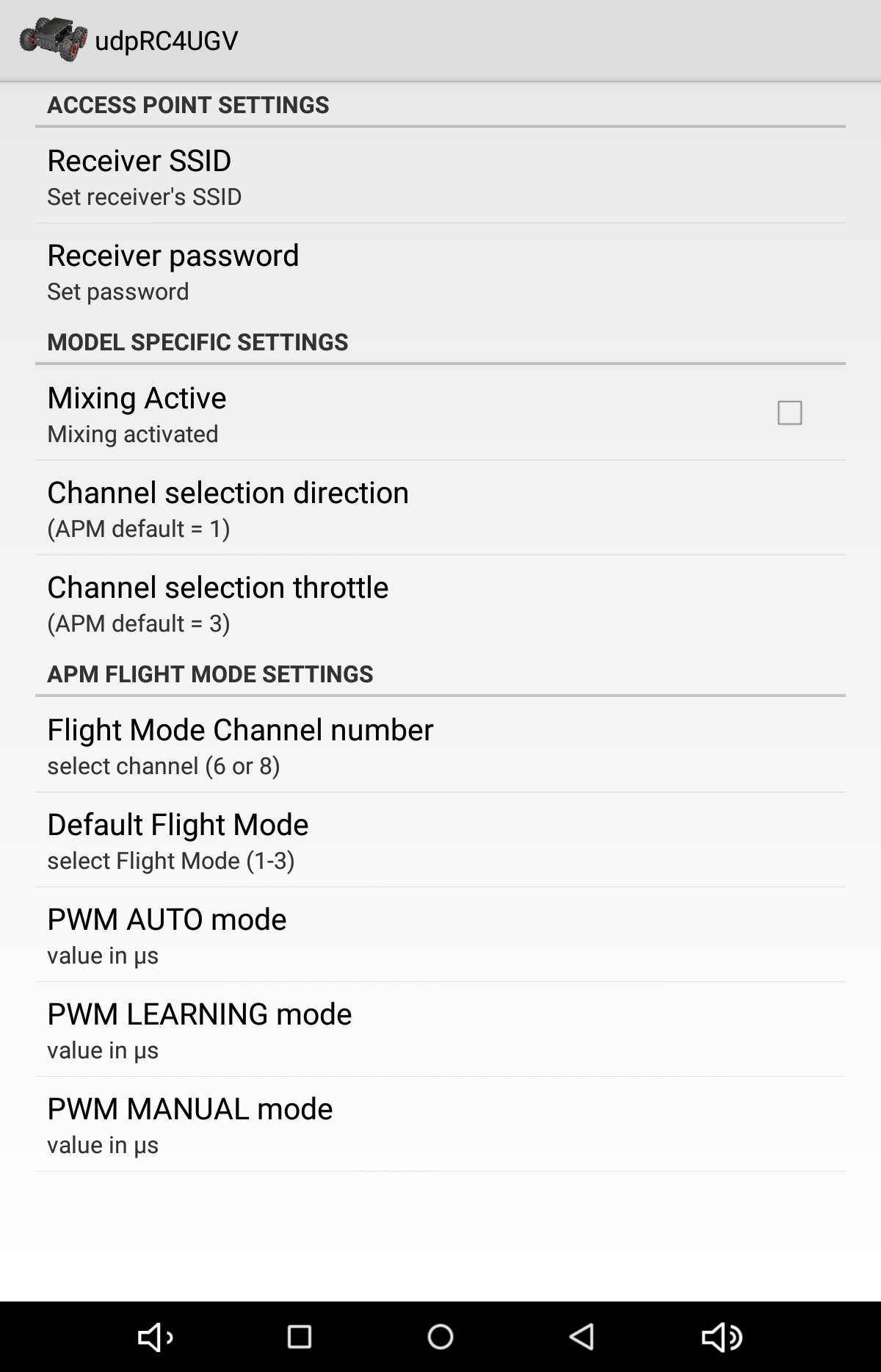
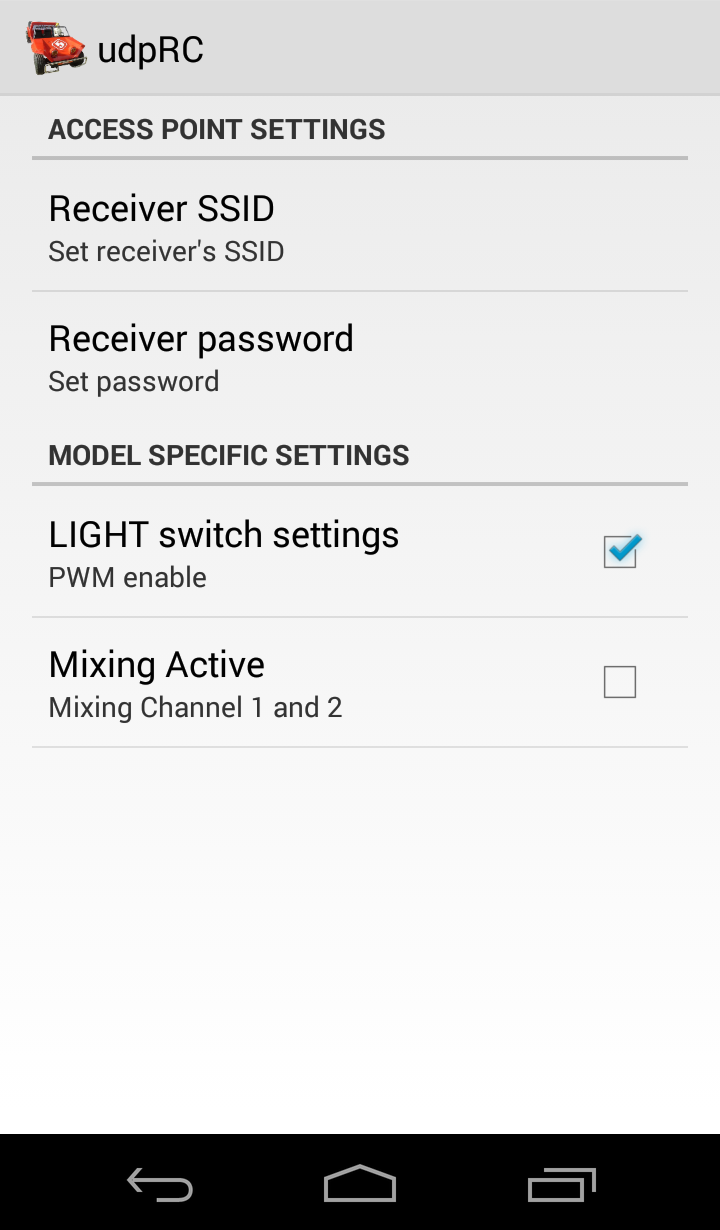
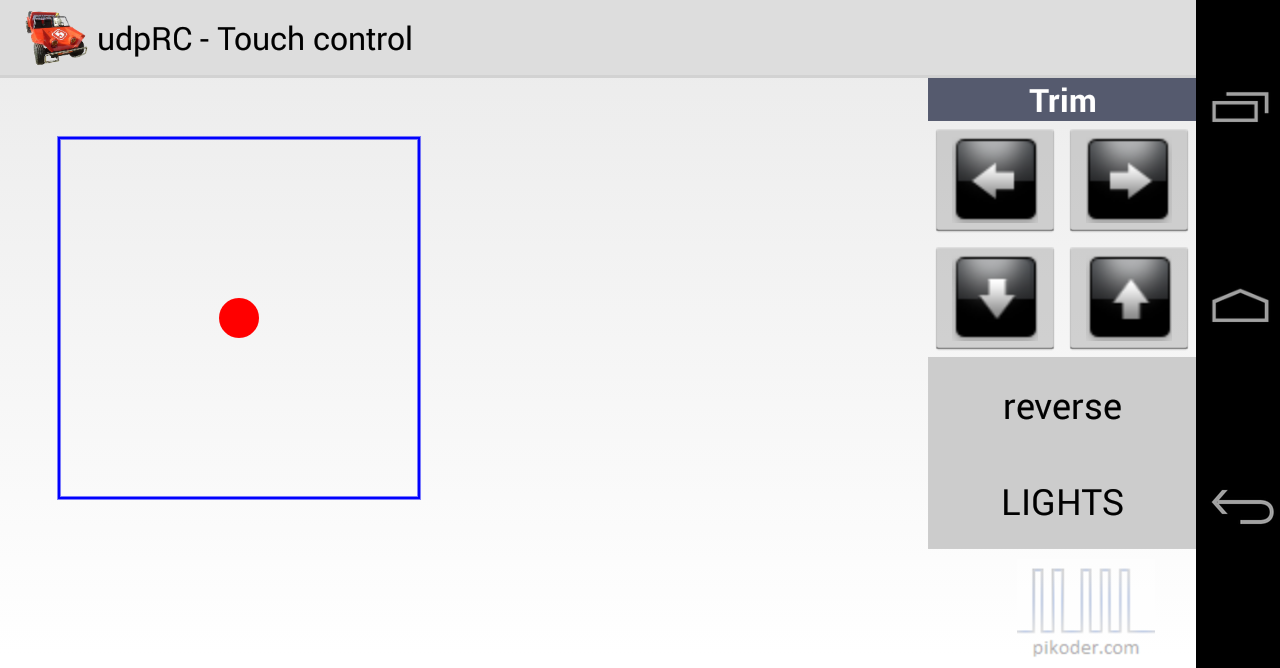
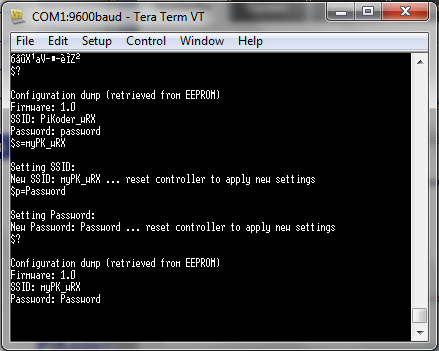
udpRC Android Fernsteuer-App
Die Fernsteuerung erfolgt über die udpRC App, die ich speziell für diese Buggy-Anwendung erweitert habe (Release 1.10). Neben dem neuen Buggy Picto bietet die Touch-Bedieneroberfläche nun eine Trim- sowie eine reverse- und Light-Funktion an.
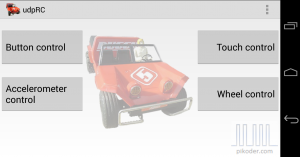
Die udpRC App ist kostenlos im Google Play Store erhältlich.