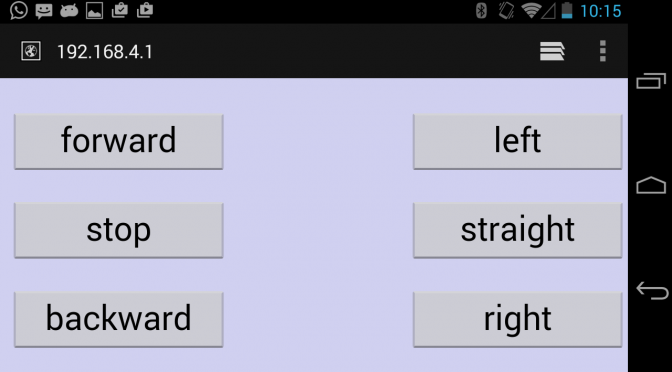
Ein Fernsteuermodell, dessen Empfänger als Access-Point konfiguriert ist und einen Webserver anbietet, kann mit einem Webbrowser von einem Smartphone aus ferngesteuert werden.
Als Hardwareplattform zur Implementierung dieses Konzepts bietet sich der PiKoder/SSC wRX an (s.u.): der ESP8266-01 realisiert den Access Point und den Webserver, der PiKoder/SSC übernimmt die zeitkritische Ansteuerung der Modellservos.

In der Standardkonfiguration des PiKoder/SSC wRX wird der ESP8266-01 als transparente Brücke verwendet. Da zur Modellfernsteuerung mit dem Browser ein Webserver benötigt wird, ist der Wifi-Controller mit neuer Firmware zu laden. Hierzu kommt das IDE des Arduino zum Einsatz, das inzwischen auch generische ESP8266 Boards unterstützt.
Der benötigte Sketch ist Open Source und wird über das github Repository makerprojects/httpRC verteilt. Laden Sie den Sourcecode herunter und öffnen den Sketch mit dem Arduino IDE. Am Anfang des Programms finden Sie Hinweise zu den benötigten Boardeinstellungen. [Update 28.12.2018: Der httpRC Sketch wurde komplett überarbeitet. Die zugehörige Beschreibung finden Sie hier.]
Der ESP8266-01 kann zum Flashen nur über einen USB-Serial-Umsetzer mit dem PC verbunden werden, da er nicht über eine USB-Schnittstelle verfügt. Hierbei ist zusätzlich zu beachten, dass das Modul eine Spannungsversorgung und Signalpegel von 3,3 Volt benötigt; der direkte Anschluss von 5 Volt zerstört die Leiterplatte! Da diese Kombination bei USB-Serial-Umsetzern nicht ganz alltäglich ist, wird üblicherweise ein Umsetzer mit 3,3 Volt Signalpegel und einem 5 Volt Spannungsausgang gewählt wie beispielsweise der bei Ebay erhältliche PL2303TA und eine zusätzliche Spannungsanpassung mit einem 3,3 Volt Regler vorgesehen.

USB-Serial Umsetzer
Da man zum Flashen außerdem noch einen Reset-Taster und einen Programmiertaster benötigt, baut man sich zweckmäßigerweise einen entsprechenden Adapter auf einer Lochrasterplatine auf.
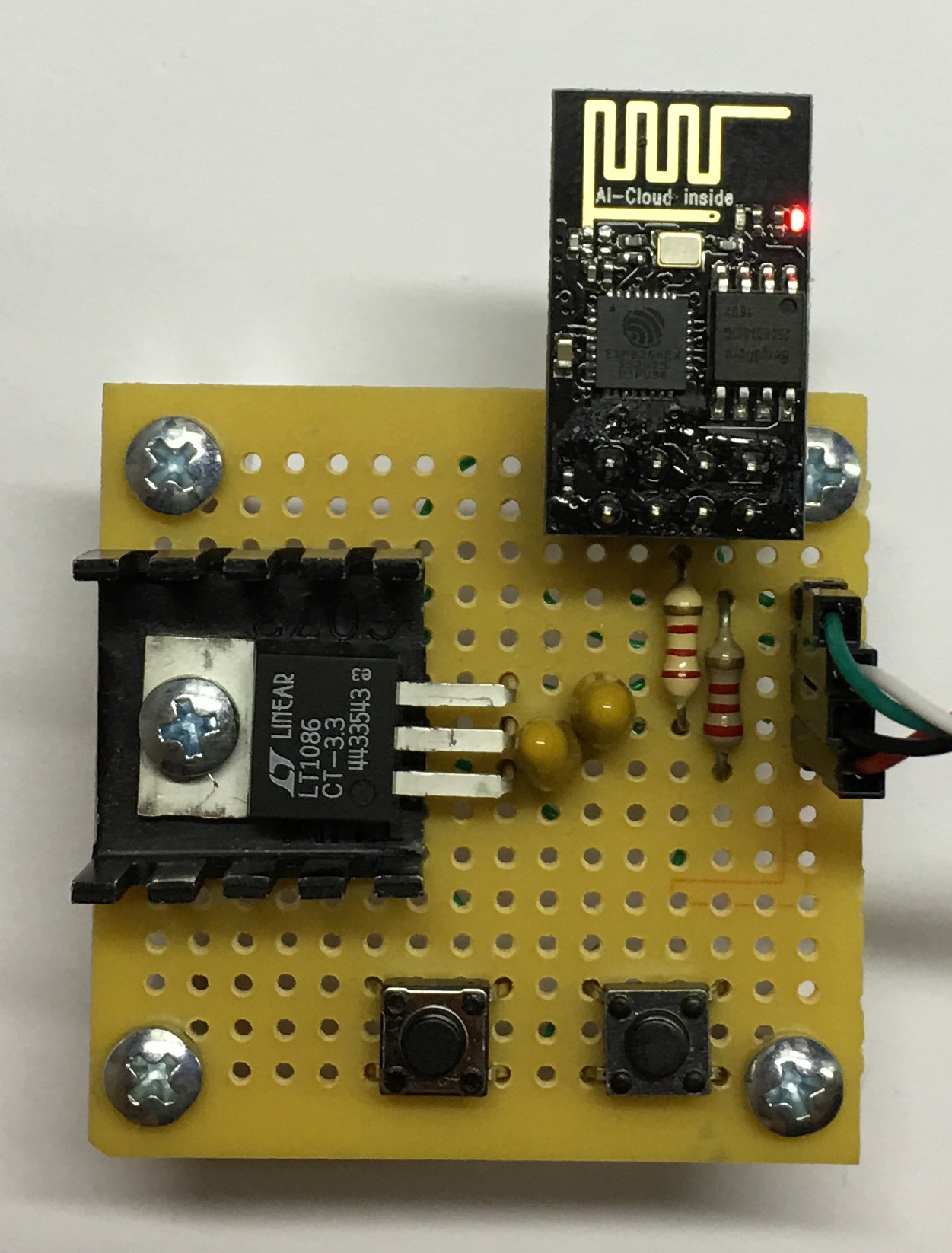
Programmieradapter für den ESP8266-01
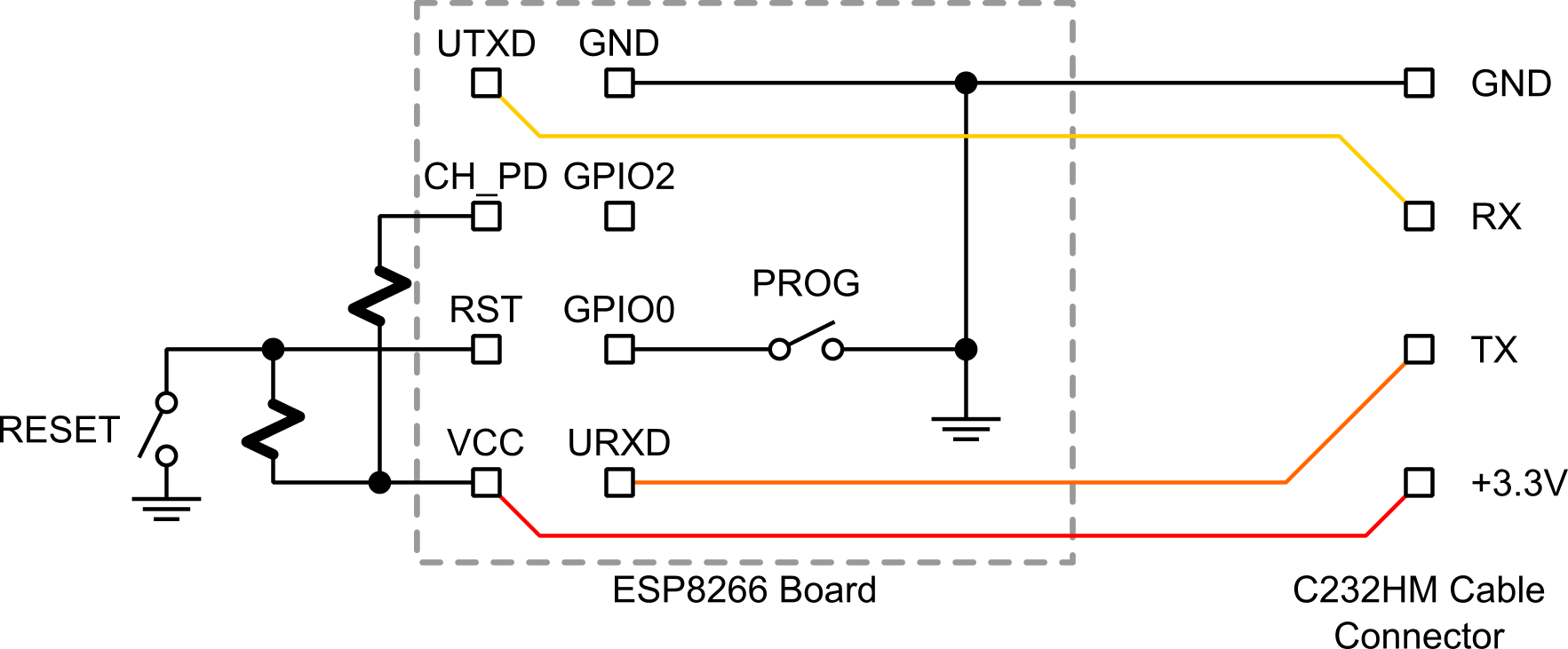
Der Schaltplan für den eigentlichen Programmierteil ist in der folgenden Schaltung dargestellt.
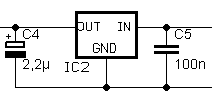
Die Erzeugung der ebenfalls benötigten 3,3 Volt kann genauso wie beim PiKoder/SSC wRX mit einem Standard-Lowdrop-Spannungsregler LF 33 CV erfolgen (s. Schaltplanauszug; die 5 Volt vom USB-Serial-Adapter werden rechts angeschlossen, der Ausgang ist auf der linken Seite.
Leider startet die Programmierung des ESP8266 nicht automatisch wie man dies vielleicht vom Arduino gewöhnt ist, sondern ist manuell einzuleiten. Hierzu werden der RST und der PROG Taster gleichzeitig gedrückt und der RST-Taster bei noch gedrücktem PROG-Taster losgelassen. Wenn danach dann auch der PROG-Taster losgelassen wird, befindet sich das Modul im Programmiermodus. Nun kann das Upload gestartet werden und nach der erfolgreichen Programmübersetzung wird die neue Firmware aufgespielt. Bevor das Modul eingesetzt werden kann, ist ein weiterer Reset erforderlich.