Overview
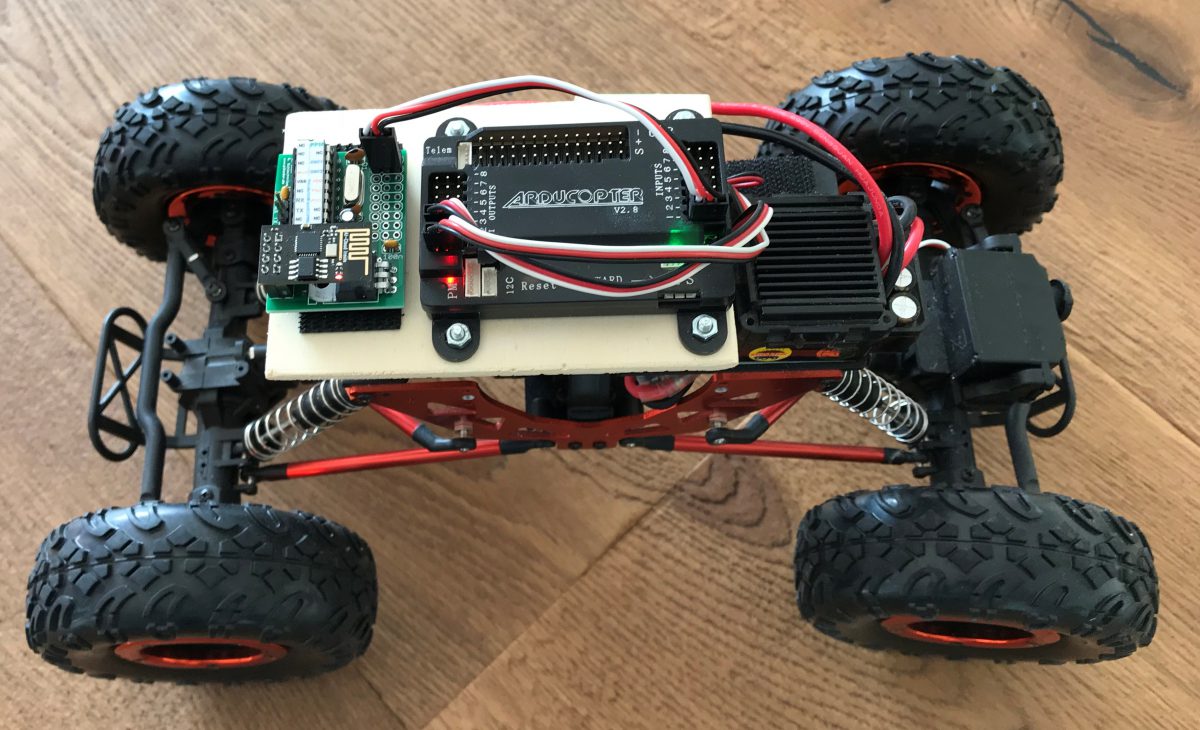
The “picCAR” App turns an Android-Tablet or Smartphone with Bluetooth into an R/C transmitter.
The app is based on the Cxem Car 1 Open Source Projekt. The app has been extended and revised to interface with a PiKoder/SSC RX receiver.
The picCar app is open source and released under a GNU General Public License Version 3; the source code is provided through github.
User interface
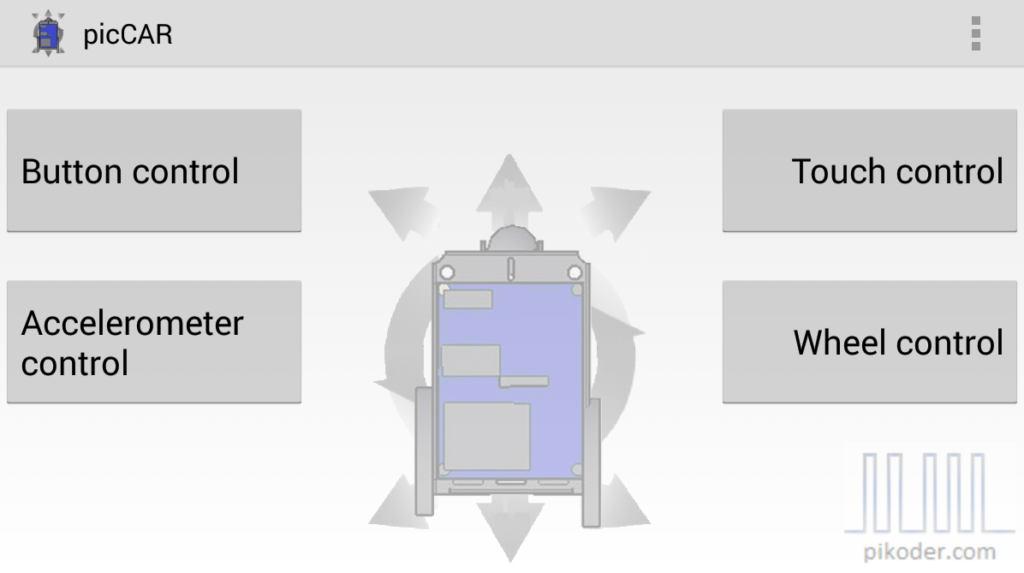
The user interface of the picCAR app is pretty intuitive and straight forward. You can select one of four control modes by touching the respective screen button: button control, a virtual joystick, accelerometer (control by moving the device) and a combination between accelerometer and a slider. The Bluetooth connection would be established once the mode has been selected.
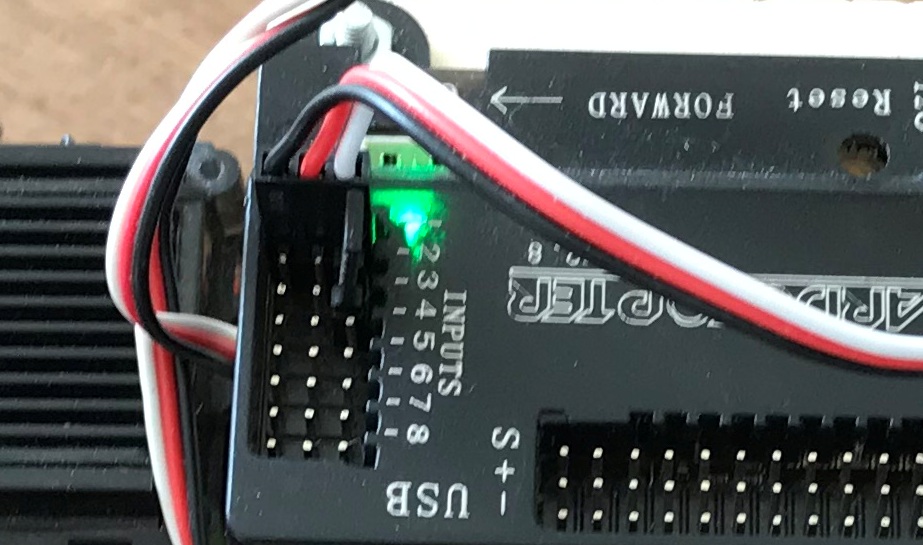
For building your receiver please refer to the PiKoder/SSC Bluetooth receiver page. The App is supported by all PiKoder/SSC firmware versions. It is recommended though that you use a PiKoder/SSC firmware 1.03 or above in order to deploy the TimeOut-Funktion of the Android app.
picCAR User’s Guide (.pdf File, EN)
The picCAR User’s Guide describes the picCAR app in detail.