
Übersicht
Der hier vorgestellte Servo Tester ist mit einem Controllerbaustein versehen und ermöglicht so gegenüber einem einfachen Aufbau mit RC-Gliedern eine stabile Impulserzeugung (Impulsbreite: 1 ms – 2 ms). Hierzu wird der interne Oszillator heran gezogen, der im gewählten Bereich der Versorgungsspannung mit einer Genauigkeit von 1% spezifiziert ist.
Weiterhin zeichnet sich der Servotester dadurch aus, dass im Gegensatz zu anderen einfacheren digitalen Geräten der Versorgungsspannungsbereich von 4,8 V – 6 V abgedeckt wird; damit kann der Servotester auch mit dem BEC-Anschluß eines Fahrtreglers verbunden werden. Die Polarität des Impulses zur Servoansteuerung kann hardwaremäßig eingestellt werden.
Darüber hinaus ermöglicht der Servo Tester den Einsatz von Servos für andere Einsatzzwecke wie z.B. zum Drehen und Schwenken von Überwachungskameras.
Schaltung
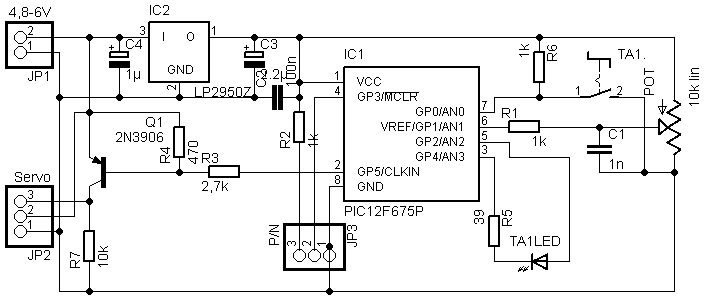
Die Schaltung basiert auf dem PIC12F675, der den Servotester steuert. Die Versorgungsspannung des Controllers wird durch einen entsprechenden Regler auf 3,3 V abgesenkt; damit wird einerseits die höchste Genauigkeit des internen Oszillators erreicht und andererseits kann so der große Versorgungsspannungsbereich des Testers gewährleistet werden.
Allerdings erfordert dieser Ansatz einen Treibertransistor Q1, der die Pegelanpassung zur Ansteuerung des Servos vornimmt. Die Versorgungsspannung des Servos ist direkt durch geschleift, so dass Servos oder Motorregler entweder mit der bereits im Modell vorhandenen Batterie / BEC-Versorgung durch den Fahrtregler oder mittels einer zusätzlichen Spannungsversorgung getestet werden können (in dieser Konfiguration ist sicherzustellen, dass keine Versorgung über den Servostecker erfolgt).
Über den Jumper JP3 wird die Polarität des Steuerimpulses für das Servo eingestellt. Bitte beachten Sie, dass es sich bei der LED um eine Bi-Color-LED handelt.
Bedienung
Die Bedienung ist einfach und intuitiv. Der Servotester verfügt über zwei verschiedene Betriebsarten: der Manual-Mode, bei dem die Steuerung des Servos per Drehknopf P1 erfolgt und die Neutralstellung eingestellt werden kann und dem Exercise-Mode, in dem das Servo automatisch zwischen den Anschlägen hin- und her gefahren wird. Der Wechsel zwischen den beiden Betriebsarten erfolgt durch die Betätigung des Tasters S1. Über die LED kann jeweils erkannt werden, in welchem Modus sich der Servotester befindet.
Nach dem Einschalten befindet sich das Gerät im Manual-Mode und die Servoposition wird durch Drehung des Potentiometers P1 eingestellt. Im Impulsbereich außerhalb des Fensters von 1,45 ms und 1,55 ms leuchtet die LED grün. Um die Neutralstellung definiert anzufahren, wechselt die Farbe der LED innerhalb dieses Fensters auf gelb bzw. beide Farben der LED leuchten und bei Erreichen der Neutralstellung von 1,5 ms wird schließlich rot angezeigt; es muss also kein Taster gedrückt werden und beide Hände sind frei, um ggf. Justagearbeiten durchführen zu können.
Im Exercise Mode stehen zwei Geschwindigkeiten zur Auswahl. Die LED blinkt in dieser Betriebsart rot und zeigt über ihre Blinkfrequenz an, welche Geschwindigkeit gewählt wurde (0,25 s entsprechend 2 x blinken/Sekunde oder 15 s (entsprechend einmal 2 s an, dann 2 s aus) von Endausschlag zu Endausschlag). Die Umschaltung der Geschwindigkeit erfolgt durch Verdrehung des Potentiometers: wird eine Impulslänge größer als 1,5 ms eingestellt, dann wird der Exercise Mode mit hoher Geschwindigkeit gewählt, ansonsten erfolgt die langsame Ansteuerung des Servos.
Software Download
Die Firmware für den Servotester (Release 1.0) ist Freeware, die gemäß dem zugrunde liegenden End User License Agreement (EULA) für private, nicht kommerzielle Zwecke ohne Einschränkungen genutzt werden kann.
Servotester Bausatz und Komponenten
Im Shop finden Sie einen kompletten Bausatz für den Tester.
Hallo,
eine sehr einfache und stabile Schaltung.
Ich habe das Poty gegen einen PIC mit 8-bit-DAC ausgetauscht.
So kann ich die Servoposition durch einen 8-bit-Wert über Software steuern.