Seit vielen Jahren steht die Restauration einer Graupner Bellaphon A auf meiner Projektliste. Leider gibt es nach meinen bisherigen Recherchen nur wenig öffentlich zugängliche Dokumentation. Auch in den Fernsteuerbüchern von Heinz Richter, der u.a. die Metz-Fernsteuerungen sehr detailliert beschreibt, finden sich nur oberflächliche Informationen. Von daher habe ich mir vorgenommen, interessante technische Details des Senders in diesem Blog zu dokumentieren. Ich freue mich über jegliche Hinweise und Ergänzungen.
⚠ Sicherheitswarnung:
Röhrenschaltungen und Zerhacker arbeiten mit gefährlicher Hochspannung (teils über 300 V DC).
Diese Spannungen sind tödlich bei Berührung!
Dieses Projekt richtet sich nicht an Anfänger.
Wer keine Erfahrung mit Hochspannungs-Elektronik hat, sollte nicht versuchen, solche Schaltungen nachzubauen.Sicherheit geht immer vor – eine Berührung kann Herzstillstand verursachen.
Mein Ausgangspunkt war eine Bellaphon A mit eingebautem 6 Volt Bleiakku.
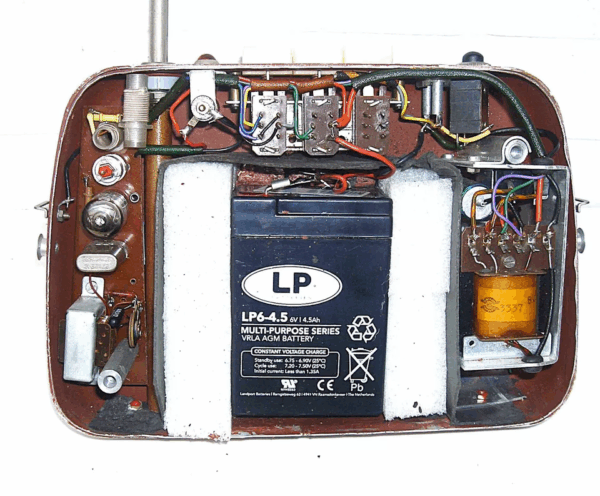
Der Sender befindet sich auf der linken Seite und auf der rechten Seite erfolgt die Erzeugung der benötigten Anodenspannung von ca. 180 Volt.
Nach dem Einschalten meines Senders leuchtete die Betriebsanzeige und die Röhre im Sender wurde beheizt.
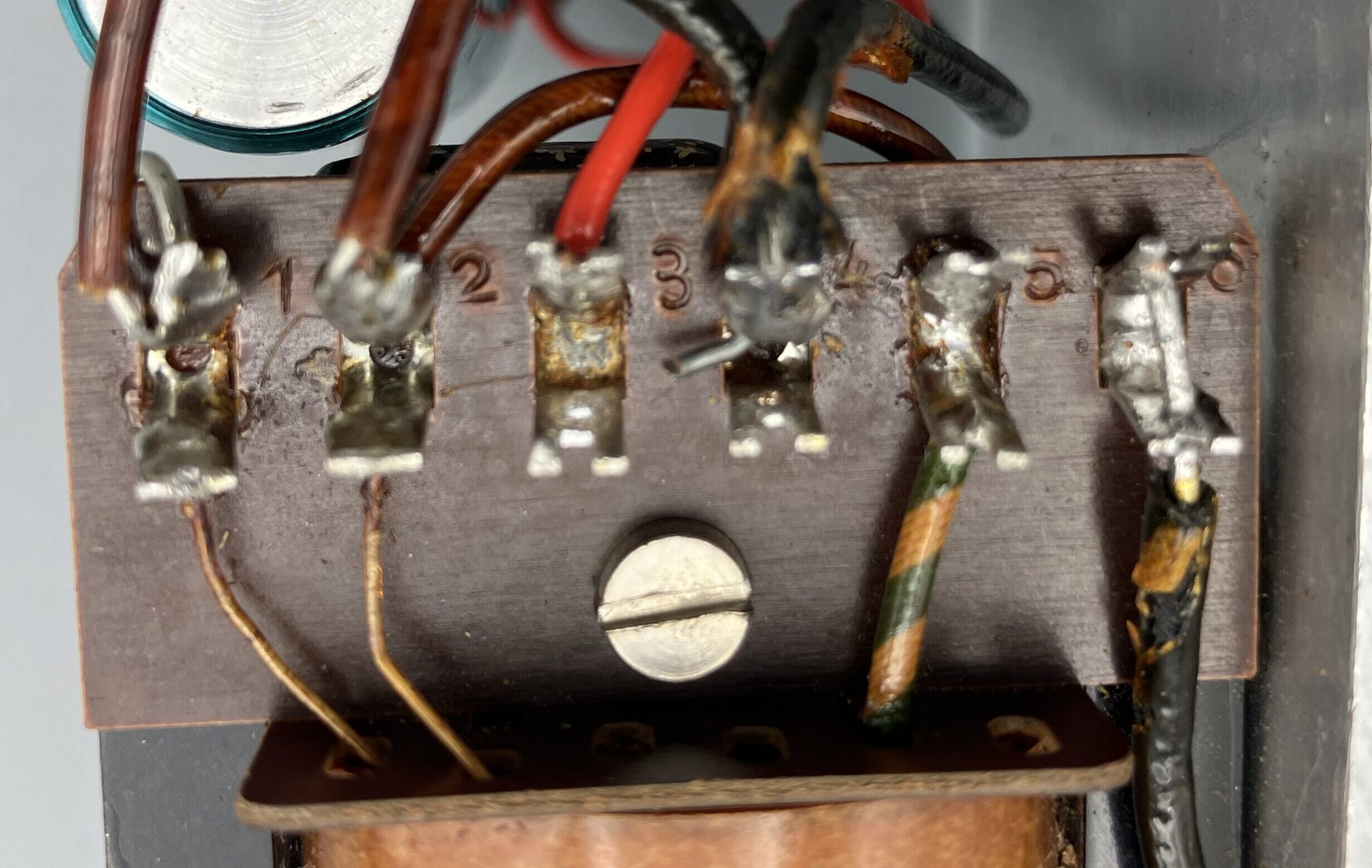 Aber der Sender funktionierte nicht, weil die die Anodenspannung, die normalerweise zwischen den Anschlüssen 3 und 4 anliegen sollte (s. Bild mit der Anschlussbelegung des Trafos), nicht erzeugt wurde. Beim Ausbau der Spannungswandler-Baugruppe aus dem Sendergehäuse kam dann zu meinem Erstaunen ein mechanischer
Aber der Sender funktionierte nicht, weil die die Anodenspannung, die normalerweise zwischen den Anschlüssen 3 und 4 anliegen sollte (s. Bild mit der Anschlussbelegung des Trafos), nicht erzeugt wurde. Beim Ausbau der Spannungswandler-Baugruppe aus dem Sendergehäuse kam dann zu meinem Erstaunen ein mechanischer  Zerhacker vom Typ KACO H100/6 (s. Bild links) zum Vorschein, der keinen „Mucks mehr machte“. Ich hatte immer angenommen, dass der Spannungswandler ähnlich wie bei den Metz-Geräten mit einem Transistor bestückt wäre.
Zerhacker vom Typ KACO H100/6 (s. Bild links) zum Vorschein, der keinen „Mucks mehr machte“. Ich hatte immer angenommen, dass der Spannungswandler ähnlich wie bei den Metz-Geräten mit einem Transistor bestückt wäre.
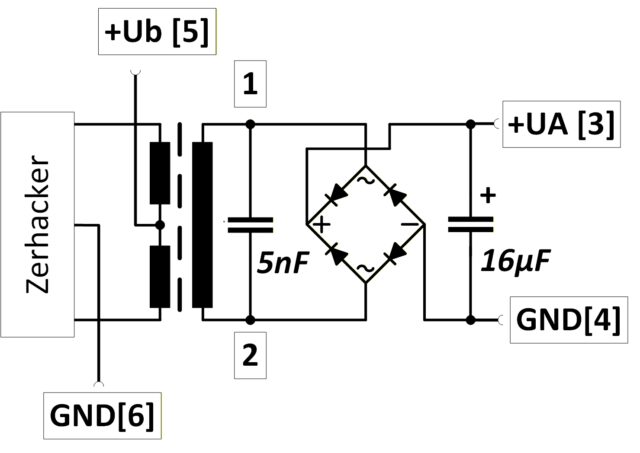
Die sehr geringe Wahrscheinlichkeit einen originalen und voll funktionsfähigen Zerhacker zu finden in Verbindung mit meiner geringen Neigung, mich mit der Elektromechanik des Zerhackers auseinander zu setzen, ließ mich sehr schnell über einen elektronischen Ersatz nachdenken. Der gesamte Schaltplan für die Spannungswandler-Baugruppe war zwar relativ leicht zu ermitteln (s. Bild unten – die Ziffern entsprechen den Anschlüssen des Trafos), aber die geringe Baugröße des KACO H100/6 – Gehäuses, das den neuen Zerhacker aufnehmen sollte, stellte mit einer maximalen Platinengröße von 42 x 20 mm eine Herausforderung dar.
Elektronischer Zerhacker: Auf- und Einbau
Im Internet habe ich diverse Schaltungsvorschläge gefunden und einige davon auch als Prototyp aufgebaut., aber dann letztlich doch eine eigene Schaltung entwickelt, die meinen Vorstellungen entspricht. 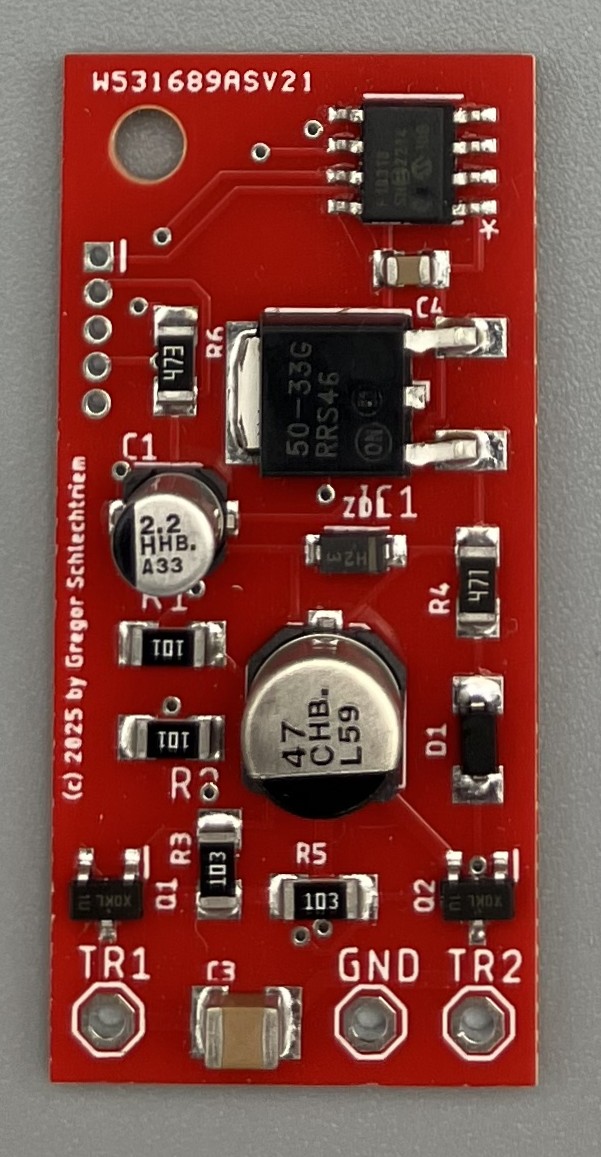 Als Taktgenerator für die benötigte 200 Hz Frequenz wird ein PIC-Controller eingesetzt. Damit lassen sich symmetrische Rechtecksignale mit sauber definiterer Pulsweite zur Ansteuerung der MOSFETs erzeugen. Zur Theorie gibt es ein sehenswertes YouTube Video (ab Minute 20).
Als Taktgenerator für die benötigte 200 Hz Frequenz wird ein PIC-Controller eingesetzt. Damit lassen sich symmetrische Rechtecksignale mit sauber definiterer Pulsweite zur Ansteuerung der MOSFETs erzeugen. Zur Theorie gibt es ein sehenswertes YouTube Video (ab Minute 20).
Die Versorgungsspannung für den Controller wird lokal erzeugt, so dass keine zusätzlichen Leitungen über die ohnehin vorhandenen Anschlüsse des Zerhackers hinaus erforderlich sind. Durch den Einsatz von SMD Bauteilen und die Auswahl geeigneter MOSFETs konnte ich alle Komponenten auf einer einseitig bestückten Leiterplatte unterbringen (s. Bild rechts). Die Schaltung ist so dimensioniert, dass sich die Bauteile nicht nennenswert erwärmen; damit kann die Leiterplatte gefahrlos in das vorhandene Gehäuse eingebaut werden. Die vollständig bestückte Leiterplatte ist im Shop erhältlich.
Wenn man die Leiterplatte in das vorhandene Gehäuse einbauen möchte bzw. 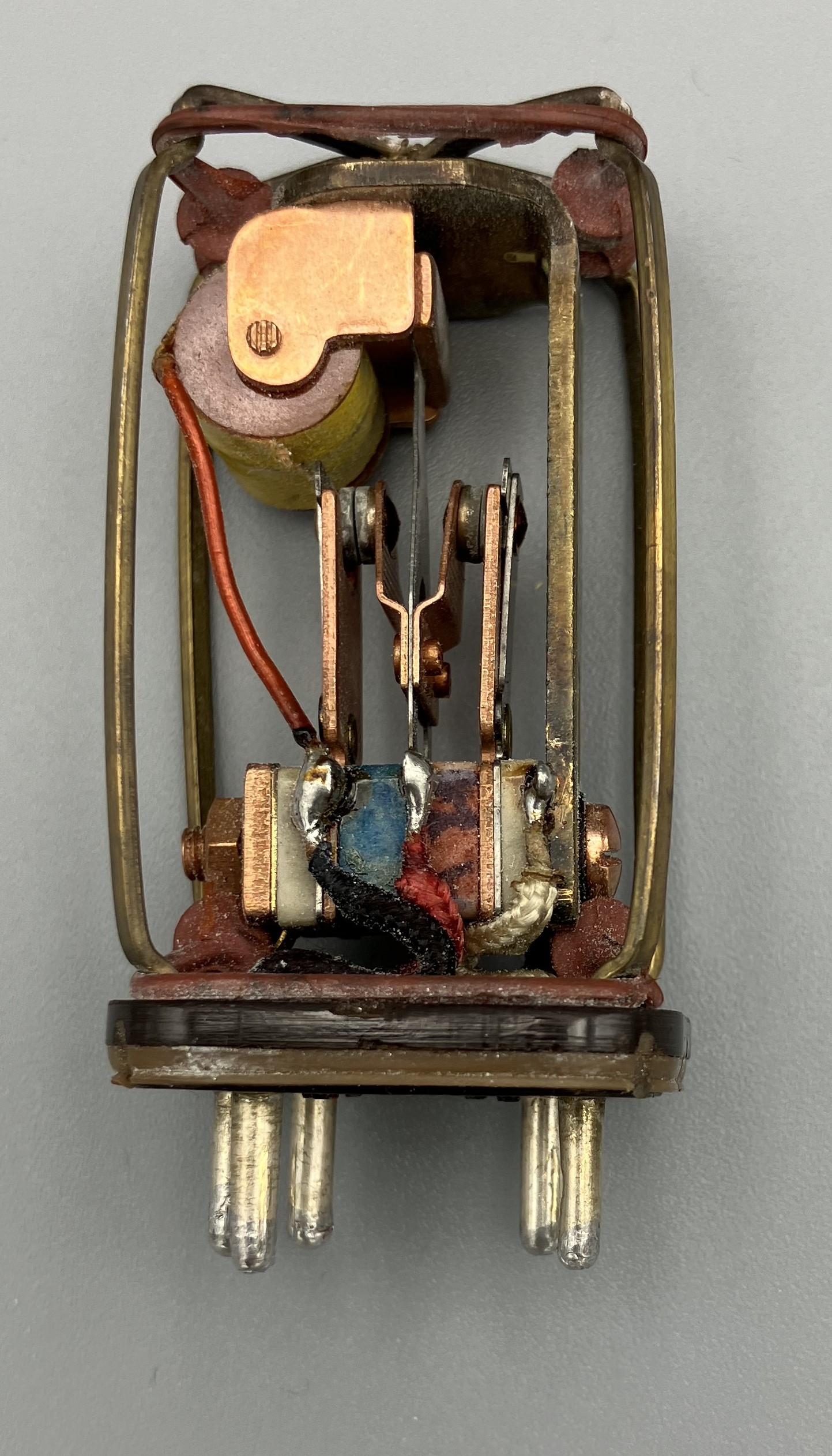 den Sockel zur Adaptierung der Leiterplatte verwenden will, dann entfernt man zunächst das Aluminium-gehäuse in dem man es unten am Sockel aufbördelt und dann abzieht. Hierzu kann etwas Kraft erforderlich sein, weil der Messingrahmen das Gehäuse zusätzlich fixiert. Dann werden die Anschlusskabel von den Sockelstiften im unteren Bereich, die später als Verbindung zur Leiterplatte dienen sollen, abgelötet (zweimal schwarzes Kabel – jeweils einmal auf der Vorder- und einmal auf der Rückseite – und einmal rotes und einmal weißes Kabel).
den Sockel zur Adaptierung der Leiterplatte verwenden will, dann entfernt man zunächst das Aluminium-gehäuse in dem man es unten am Sockel aufbördelt und dann abzieht. Hierzu kann etwas Kraft erforderlich sein, weil der Messingrahmen das Gehäuse zusätzlich fixiert. Dann werden die Anschlusskabel von den Sockelstiften im unteren Bereich, die später als Verbindung zur Leiterplatte dienen sollen, abgelötet (zweimal schwarzes Kabel – jeweils einmal auf der Vorder- und einmal auf der Rückseite – und einmal rotes und einmal weißes Kabel).
Im nächsten Schritt wird das Innenleben des Zerhackers komplett entfernt, um Platz für die Leiterplatte zu schaffen. Das weiße Kabel wird nicht weiter verwendet und kann direkt am Sockel abgeschnitten werden. Die Drahtbrücke zwischen weiß und rot sollte ebenfalls herausgetrennt werden, um mögliche Kurzschlüsse zu vermeiden.
Platz für die Leiterplatte zu schaffen. Das weiße Kabel wird nicht weiter verwendet und kann direkt am Sockel abgeschnitten werden. Die Drahtbrücke zwischen weiß und rot sollte ebenfalls herausgetrennt werden, um mögliche Kurzschlüsse zu vermeiden.
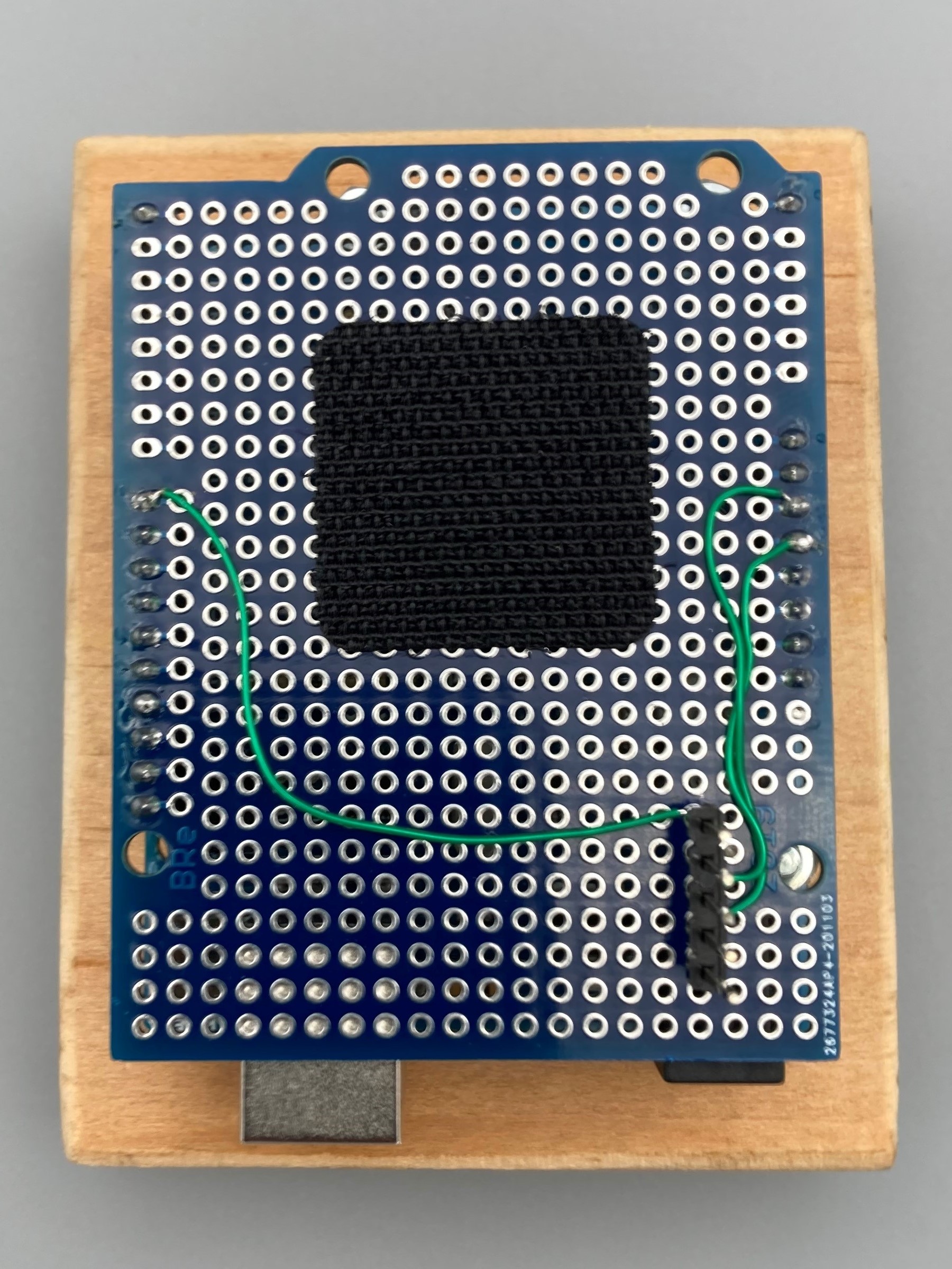
Die Leiterplatte kann jetzt im Drahtkäfig positioniert und angeschlossen werden. Das rote Kabel wird mit GND verbunden und die schwarzen Kabel mit TR1 bzw. TR2 wobei es egal ist, welches schwarzes Kabel an welchen Anschluss geht.
Ich hatte mir einige Gedanken gemacht, wie ich die Zerhacker-Leiterplatte am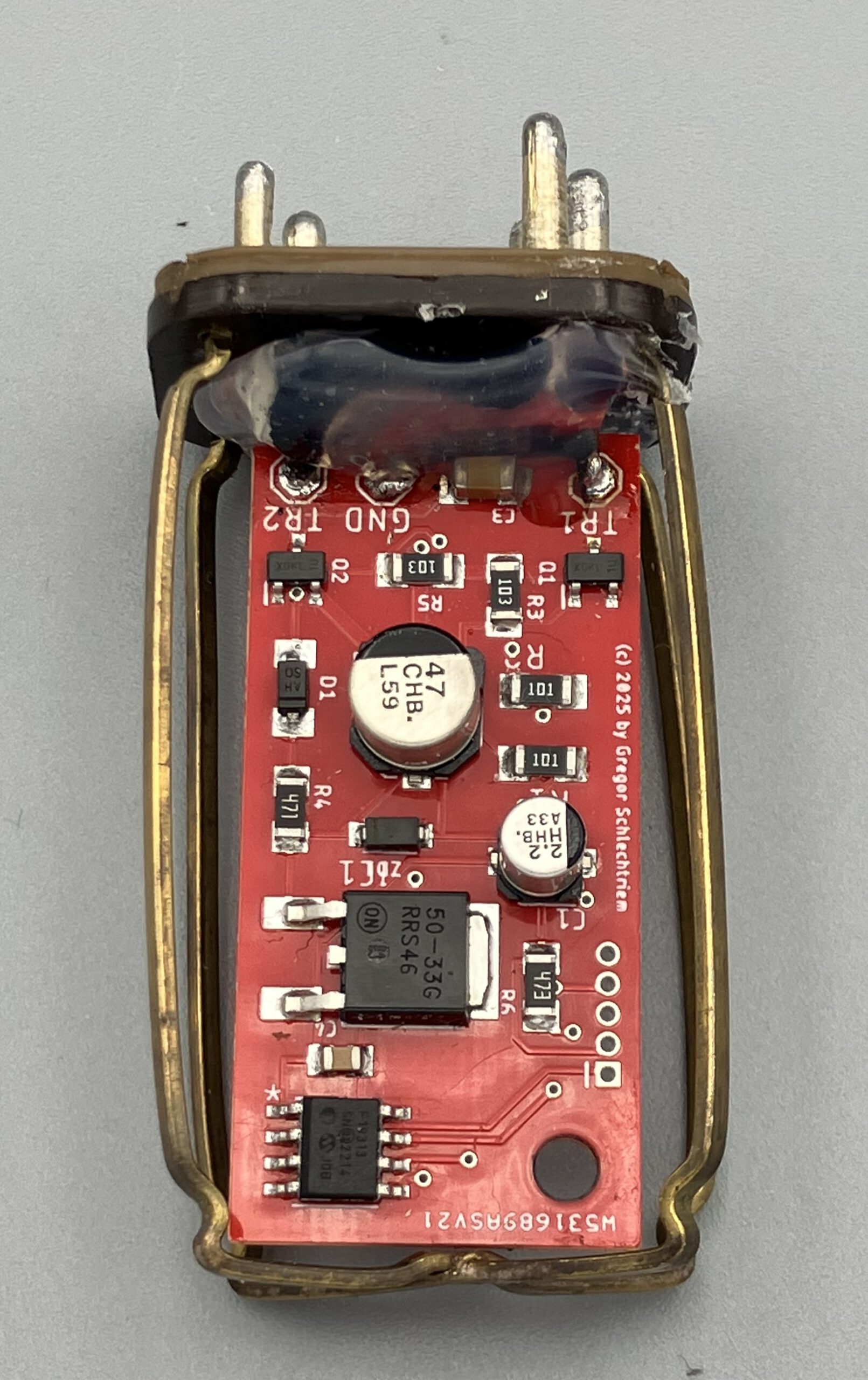 besten mechanisch befestige. Nach diversen Versuchen habe ich mich für die einfachste und schnellste Lösung entschieden und zwar die Befestigung mit einer ausreichenden Menge Heißkleber auf der Vorder- und Rückseite der Leiterplatte, um eine sichere und stabile Fixierung auf der Basisplatte zu erreichen (s. Bild rechts).
besten mechanisch befestige. Nach diversen Versuchen habe ich mich für die einfachste und schnellste Lösung entschieden und zwar die Befestigung mit einer ausreichenden Menge Heißkleber auf der Vorder- und Rückseite der Leiterplatte, um eine sichere und stabile Fixierung auf der Basisplatte zu erreichen (s. Bild rechts).
Einsatz
Ich habe den Zerhacker in zwei Bellaphon A getestet. Vor dem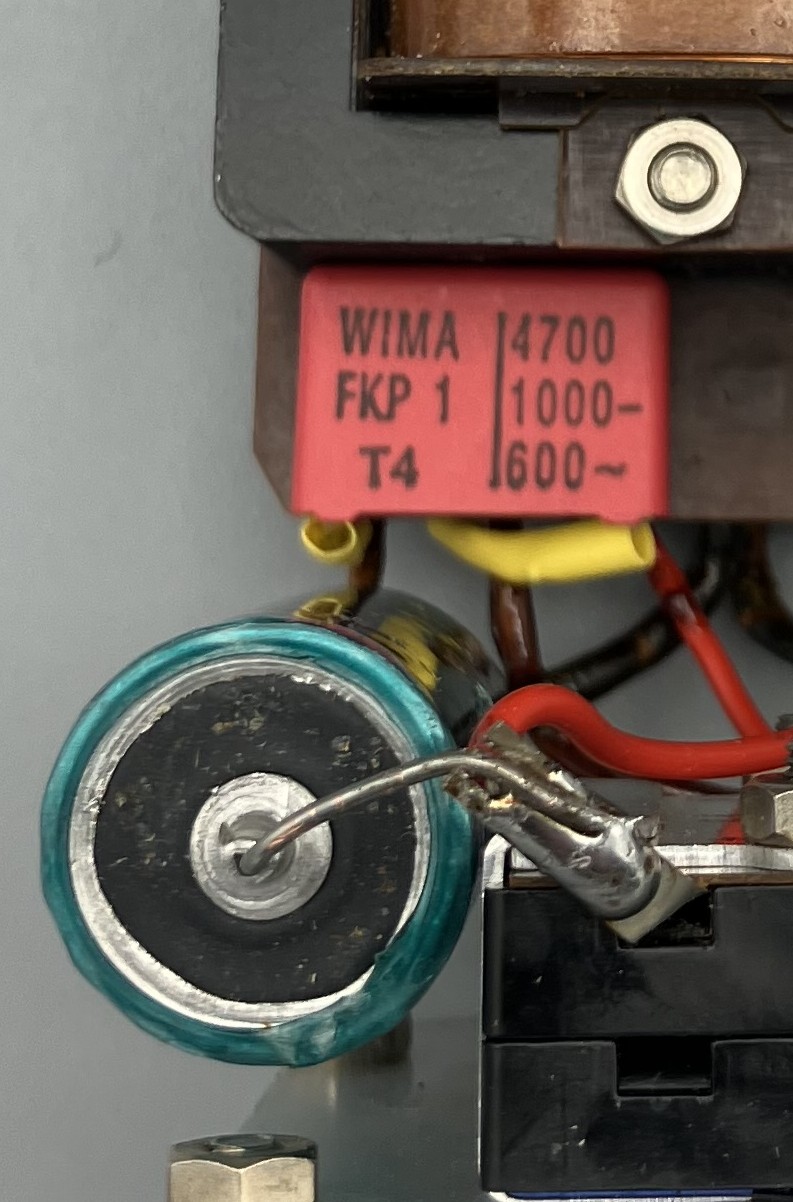 Einbau habe ich noch präventiv den brauen 5nF Papier-Kondensator gegen einen modernen Impulsfesten Typen getauscht (s. Bild rechts). Aufgrund der unterschiedlichen Stromaufnahme beider Geräte, die wahrscheinlich vom Zustand der Röhre und dem Abgleich des Senders abhängt, habe ich den Duty-Cycle des Zerhackers so programmiert, dass sich in den verschiedenen Betriebsarten (A1 und A2) Spannungswerte zwischen 150 – 180 Volt eingestellt haben (150 Volt ist die Anodenspannung der Bellaphon B, die mit Anodenbatterien arbeitet und 180 Volt ist die Katalogangabe für die Bellaphon A). Beide Sender funktionierten mit dem Zerhacker, allerdings ist der Zustand der Sender (noch) unrestauriert und es kann sein, dass ich die Parametrierung nochmals anpasse wenn ich den Senderteil im Rahmen der kommenden Restaurierung besser verstanden habe.
Einbau habe ich noch präventiv den brauen 5nF Papier-Kondensator gegen einen modernen Impulsfesten Typen getauscht (s. Bild rechts). Aufgrund der unterschiedlichen Stromaufnahme beider Geräte, die wahrscheinlich vom Zustand der Röhre und dem Abgleich des Senders abhängt, habe ich den Duty-Cycle des Zerhackers so programmiert, dass sich in den verschiedenen Betriebsarten (A1 und A2) Spannungswerte zwischen 150 – 180 Volt eingestellt haben (150 Volt ist die Anodenspannung der Bellaphon B, die mit Anodenbatterien arbeitet und 180 Volt ist die Katalogangabe für die Bellaphon A). Beide Sender funktionierten mit dem Zerhacker, allerdings ist der Zustand der Sender (noch) unrestauriert und es kann sein, dass ich die Parametrierung nochmals anpasse wenn ich den Senderteil im Rahmen der kommenden Restaurierung besser verstanden habe.