Überblick
Im Bereich der Robotik ergibt sich häufiger die Notwendigkeit mehrere Servos drahtgebunden anzusteuern, z.B. bei der Realisierung eines Roboterarms oder eines Underwater ROV. Hierbei bietet sich die Bedienung mit einem Gamepad oder Joystick an, weil die Vielzahl der Achsen / Freiheitsgrade die effiziente Kontrolle vieler Kanäle ermöglicht.
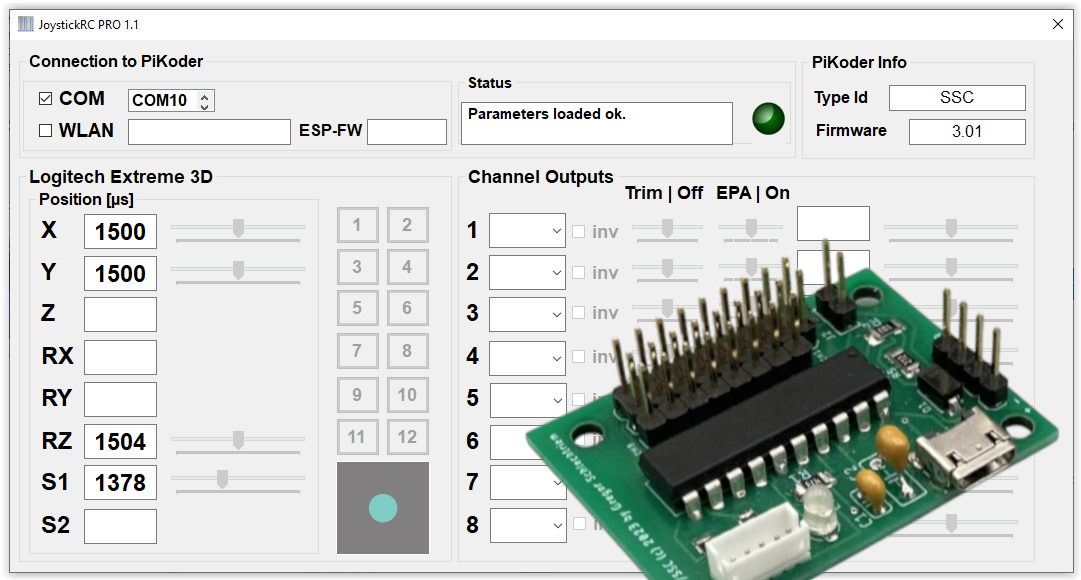
Dieser Blog beschreibt den Aufbau, um mit der kostenlosen Windows APP JoystickRC acht Servos drahtgebunden zu kontrollieren.
Die Abbildung der Achsen und Schalter auf die Servokanäle erfolgt flexibel in der Software. Die eigentliche Impulserzeugung für die Servos übernimmt ein PiKoder Serial Servo Controller (PiKoder/SSCng), der über seine USB-Schnittstelle mit dem PC verbunden ist.
Aufbau
Der Aufbau erfolgt idealerweise mit Hilfe eines PiKoder/SSCng –Entwicklungsboards und mit einem Standard USB-Kabel. Die Spannungsversorgung des PiKoder erfolgt über den USB Port. Da die USB-Schnittstelle nicht genügend Leistung zum Betrieb der Servos liefern kann, sind diese mit einer unabhängigen Spannungsquelle über die Anschlussleiste zu versorgen. Um Ausgleichströme zu verhindern, die den PC beschädigen könnten, darf der Jumper auf der PiKoder-Leiterplatte auf keinen Fall gesteckt sein. Nähere Informationen finden Sie im User Manual der PiKoder.
Software
Das Programm JoystickRC ist kostenlos im Microsoft Store erhältlich. Weitere Hinweise zur Bedienung finden Sie auf der Webseite des Programms.