Beim Design eines Röhrenoszillators mit einem Obertonquarz, der üblicherweise bei Frequenzen > 10 MHz … 15 MHz zum Einsatz kommt, sind zwei wesentliche Punkte zu beachten: Der Quarz ist in Serienresonanz zu betreiben und die maximale Quarzbelastung ist einzuhalten.
Nur im Fall von Serienresonanz ist ein stabiles Arbeiten des gesamten Oszillators gewährleistet. Wie schon das „Quarz 1×1“ von Helmut A. Wuttke in den fünfziger Jahren ausführte, sind für Obertonquarze „Röhrenschaltungen einfacher Art, bei denen nur eine Triode Verwendung findet und der Quarz zwischen Gitter und Masse liegt (Parallelresonanz), .. . abzulehnen. Die Stabilität dieser Schaltungen ist unzureichend. Zudem sind Obertonquarze grundsätzlich auf die Serien-Resonanz-Frequenz abgestimmt; die Frequenz würde also bei solchen Oszillatoren zu hoch liegen.“
Zusätzlich ist die maximale Quarzbelastung zu berücksichtigen, die bei heutigen Quarzausführungen im Bereich von 1 mW liegt. Eine höhere Belastung des Quarzes gefährdet die Frequenzstabilität (Langzeitkonstanz) und kann sogar zur Zerstörung des Quarzes führen. Von daher sind im Schaltungsentwurf geeignete Maßnahmen zur Amplitudenbegrenzung vorzusehen.
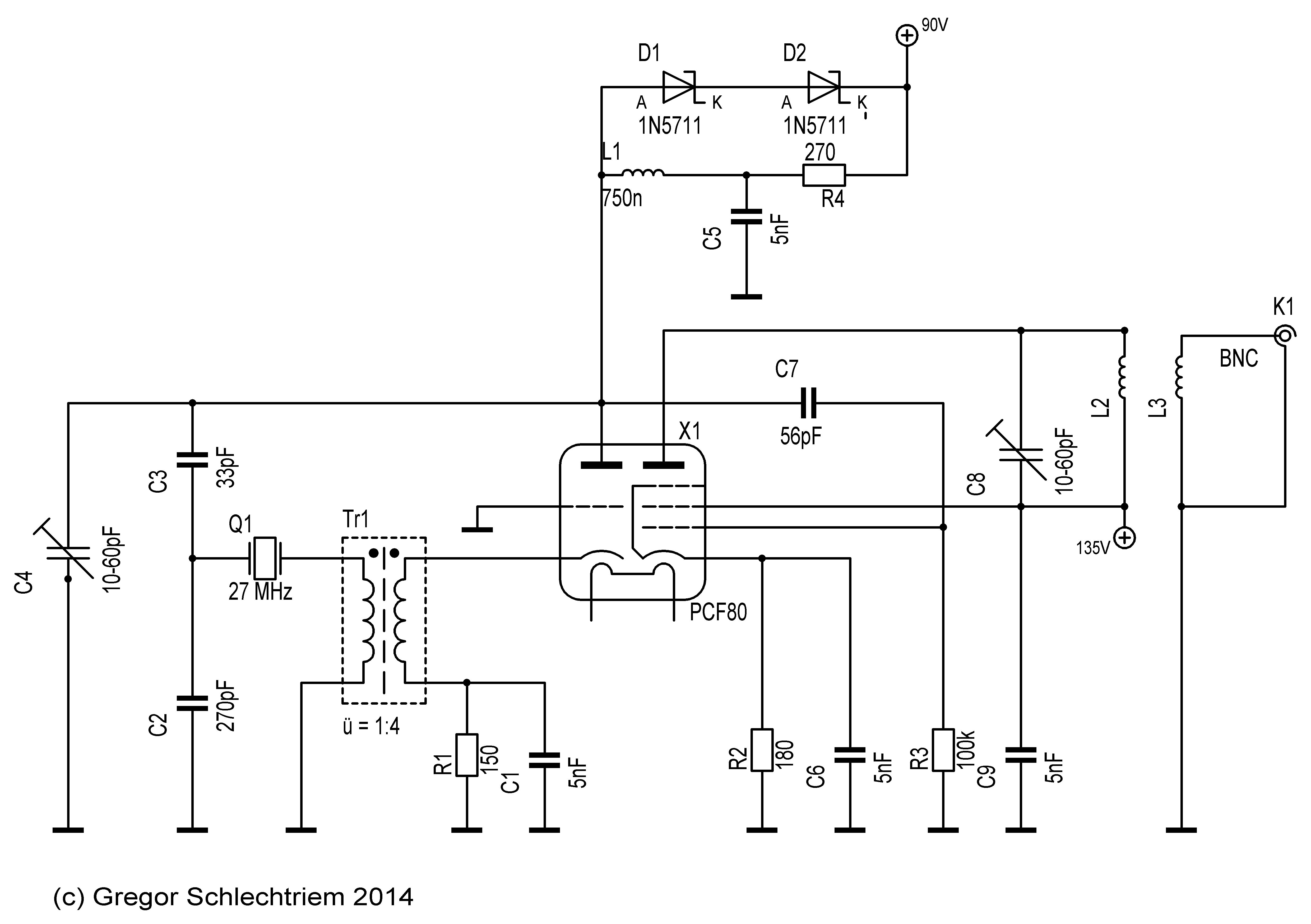
Der nachfolgend dargestellte Quarzoszillator mit einer Triode in Gitterbasisschaltung wird den genannten Anforderungen vollständig gerecht. Durch den Einsatz einer Kombiröhre mit Triode und Pentode kann die erwartungsgemäß kleine Leistung des Oszillators bis auf ca. 50 mW an 50 Ohm erhöht werden.