Überblick
Dieser Blog beschreibt die Schuco Speed-Buggy Leiterplatte und die hierauf notwendigen Änderungen für den Einsatz mit dem PiKoder/SSC wRX um den Buggy mit einem Android Smartphone oder Tablett fernsteuern zu können.
Zur Adaptierung des Empfängers an die Leiterplatte sollen die vom PiKoder/SSC wRX erzeugten Impulse für die einzelnen Kanäle hinter dem auf der Leiterplatte vorhandenen Dekoder eingespeist werden.
Aufbau der Leiterplatte
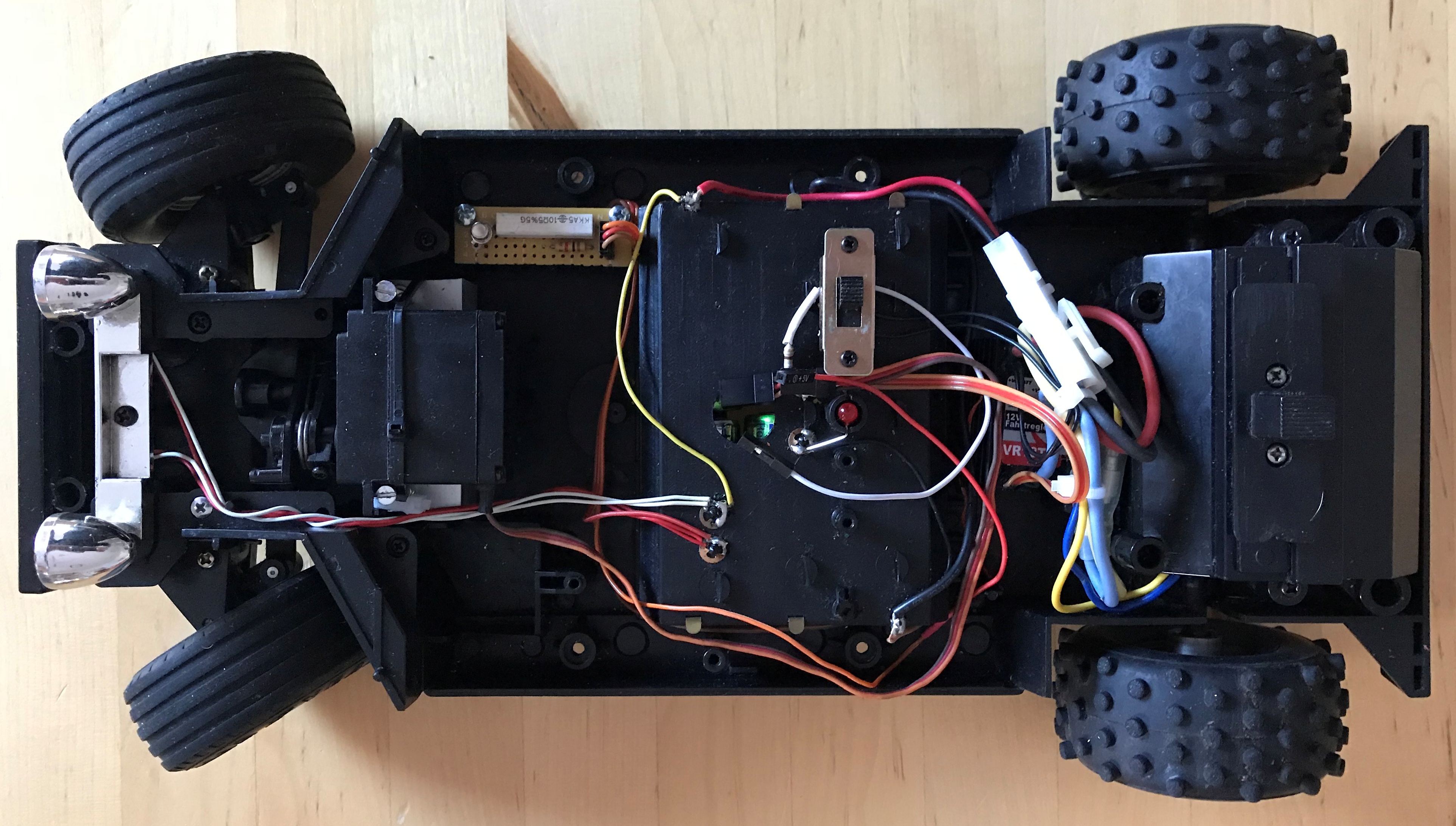
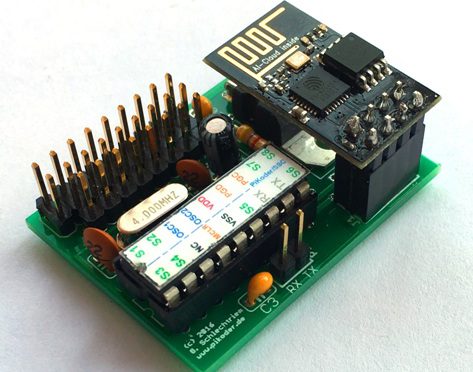
Die Leiterplatte realisiert einen Digital-Proportional-Empfänger für drei Kanäle – Richtung, Geschwindigkeit und Licht – einschließlich der erforderlichen Servo- und Motoransteuerung.
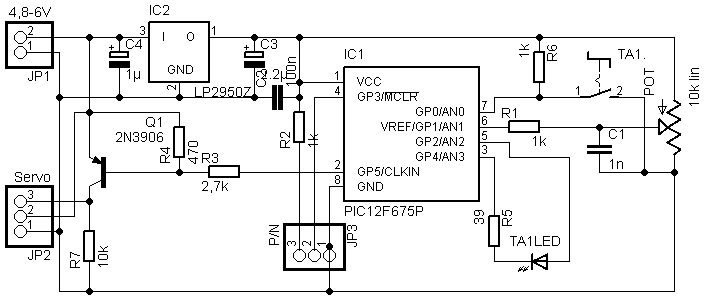
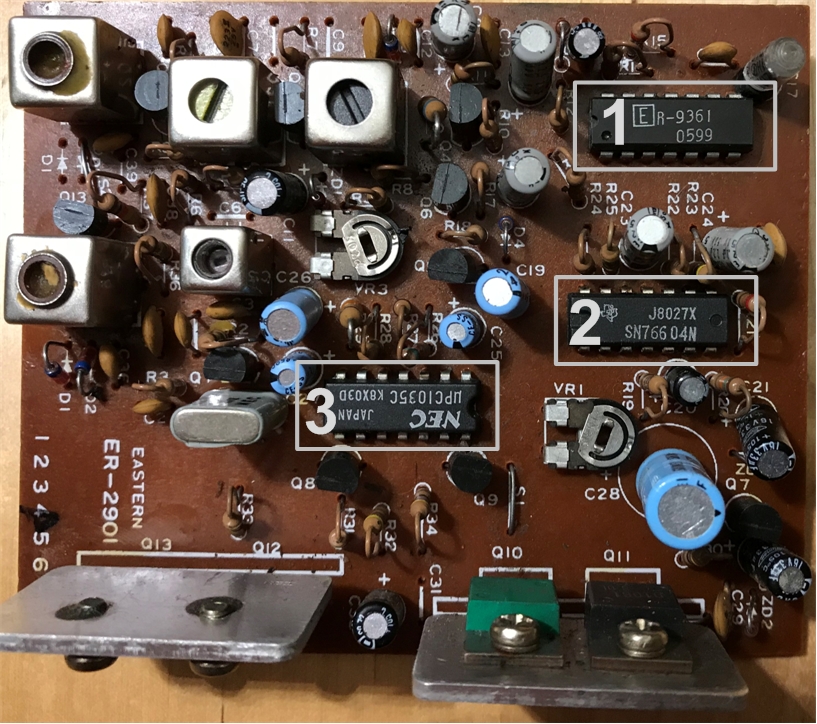
Auf der Leiterplatte sind ein diskret aufgebauter Superhet-Empfänger (der in der neuen Konfiguration nicht mehr benötigt wird), ein Dekoder-IC (IC 1 im folgenden Bild), das die eingehenden PPM – Signale in die je Kanal erforderlichen PWM Signale umsetzt, ein IC für die Lenkservosteuerung (IC 2 im folgenden Bild) und ein integrierter Schaltkreis für die Motoransteuerung (IC 3 im folgenden Bild) vorhanden.
Umbau der Leiterplatte
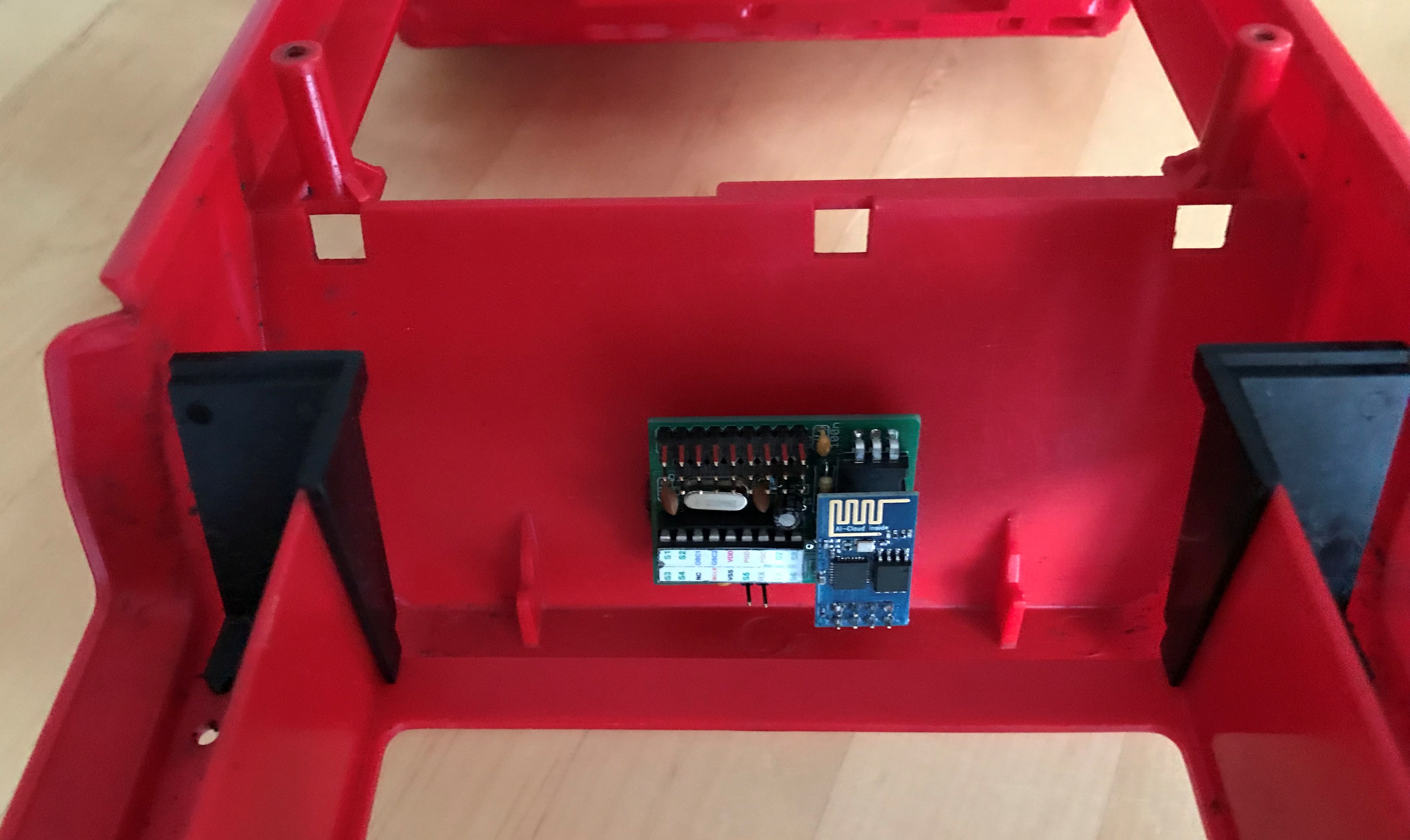
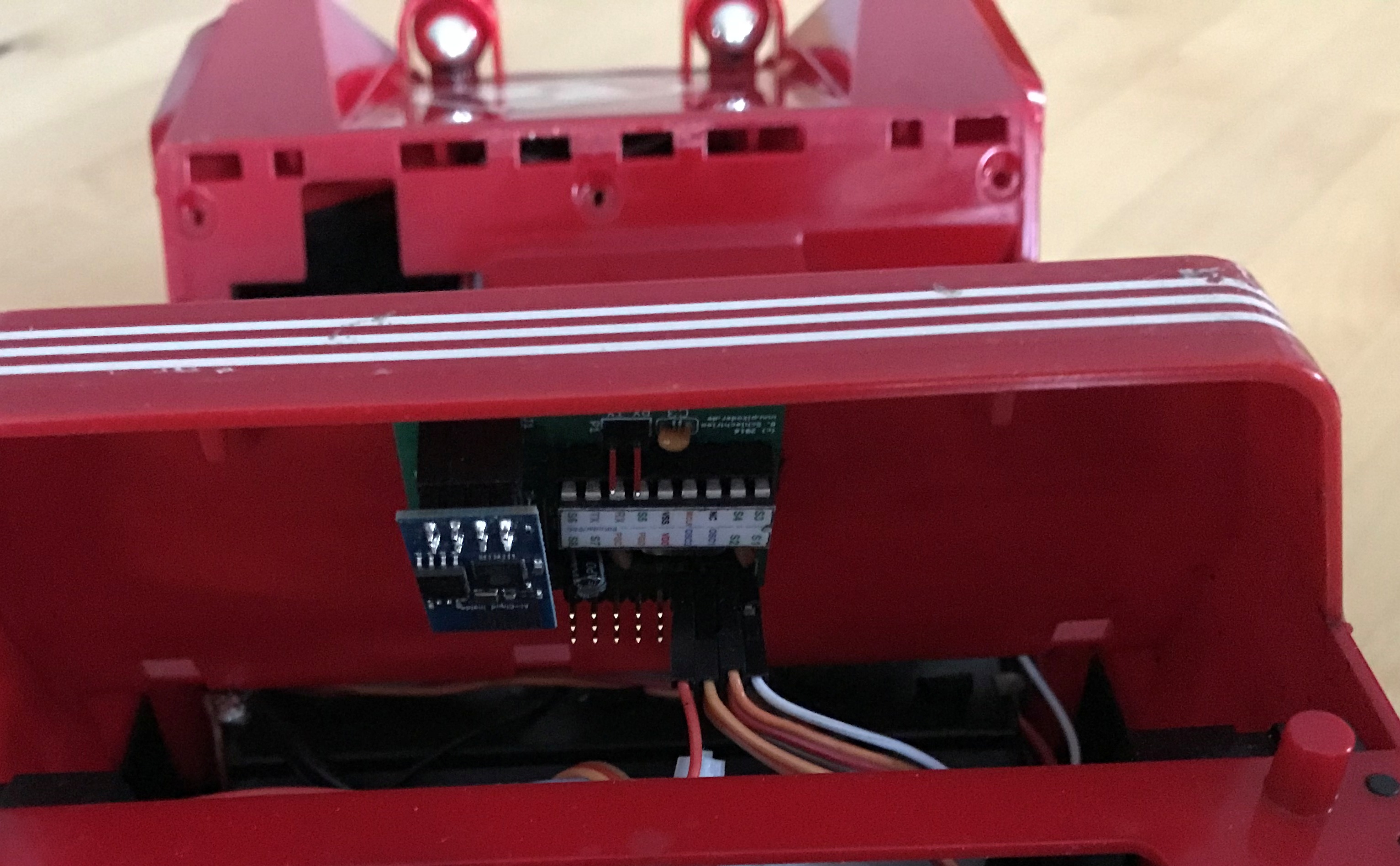
Die Kanalinformationen des PiKoder/SSC sollen die vom Dekoder erzeugten PWM Signale ersetzen. Um zu verhindern, dass sich die beiden Ausgangssignale gegenseitig stören bzw. die gegeneinander geschalteten Ausgangsstufen zerstört werden, habe ich das Dekoder-IC ausgelötet. Da die Leiterplatte einseitig ausgeführt ist, ging dies ohne Komplikationen und Leiterbahnablösungen.
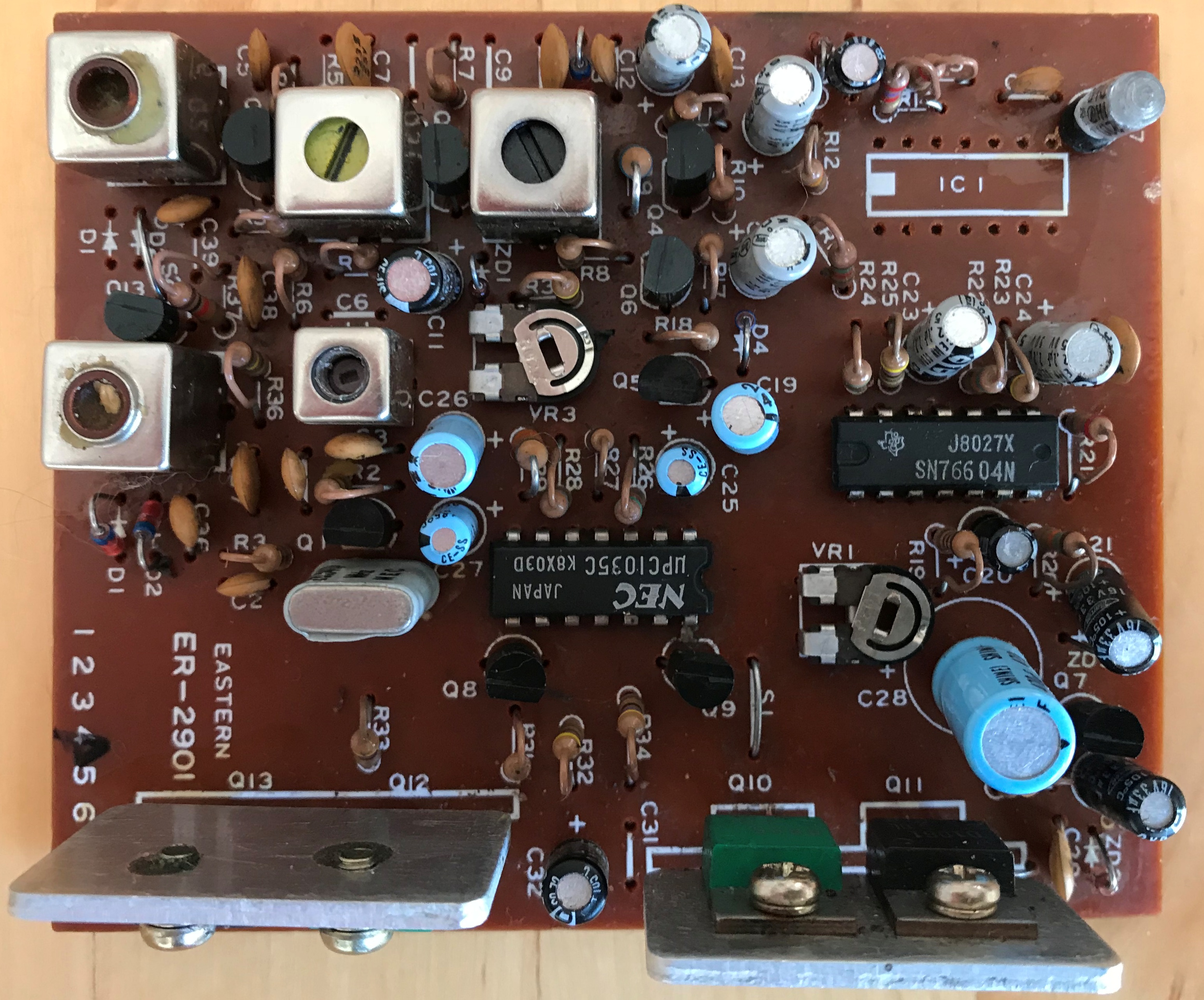
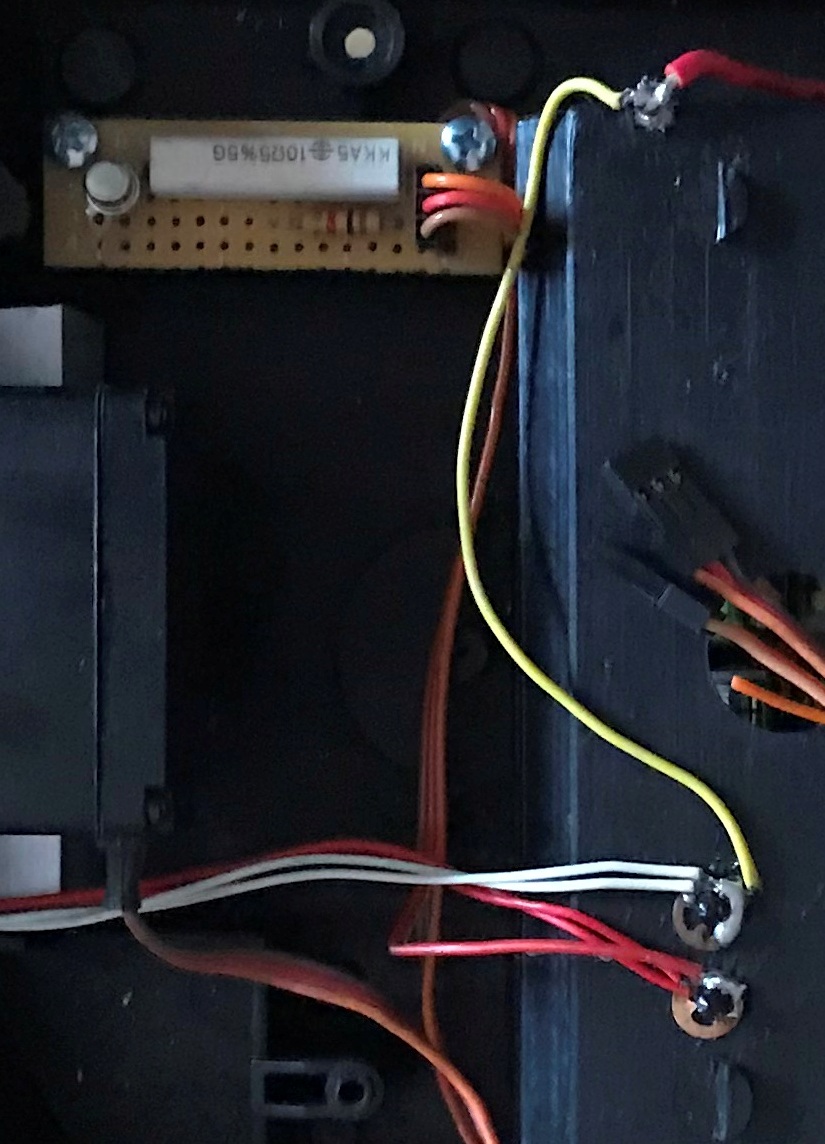
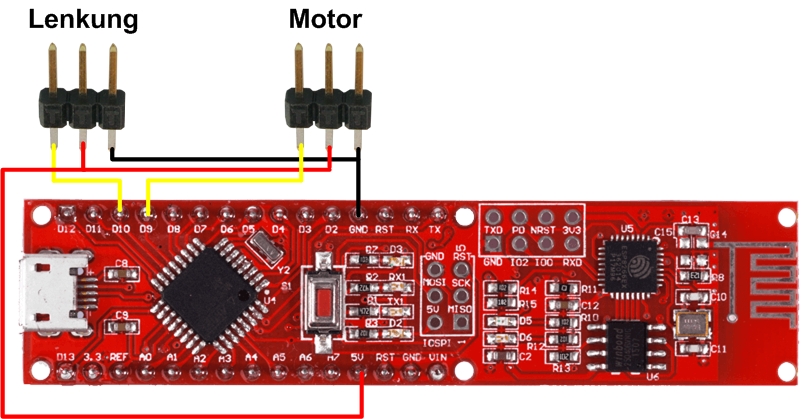
Die Pins, an denen die dekodierten Signale abgegeben wurden, habe ich durch eine Stiftleiste ersetzt.

Die Belegung der Stifte von links nach rechts ist: Eingang für Lenkung, Motor, Licht.
Wie Sie vielleicht später beim Vergleich der Leiterplattenbilder feststellen werden, musste ich aufgrund eines Defektes der Leiterplatte das IC2 ersetzen.
Test und Messungen
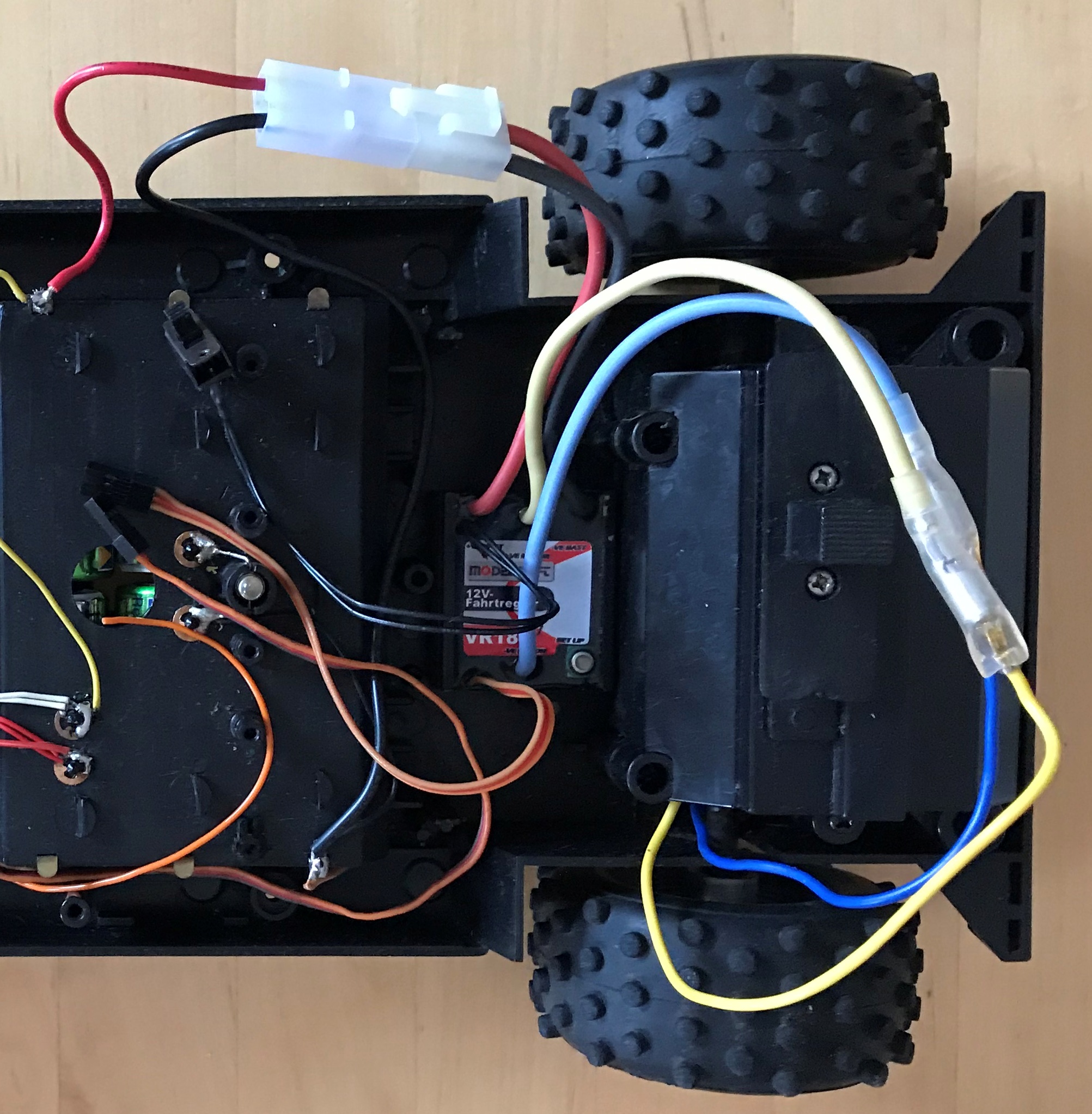
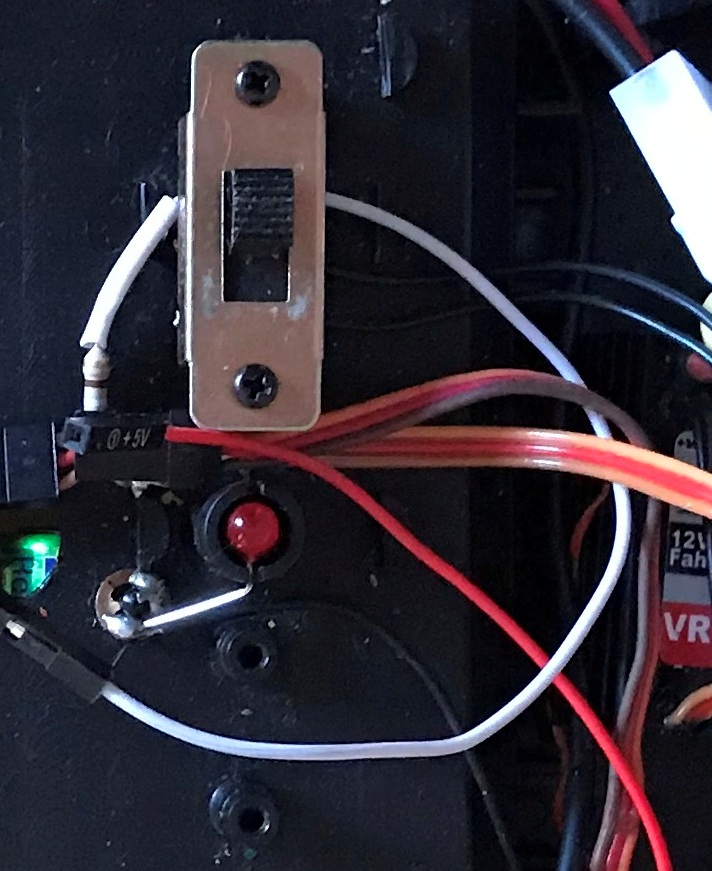
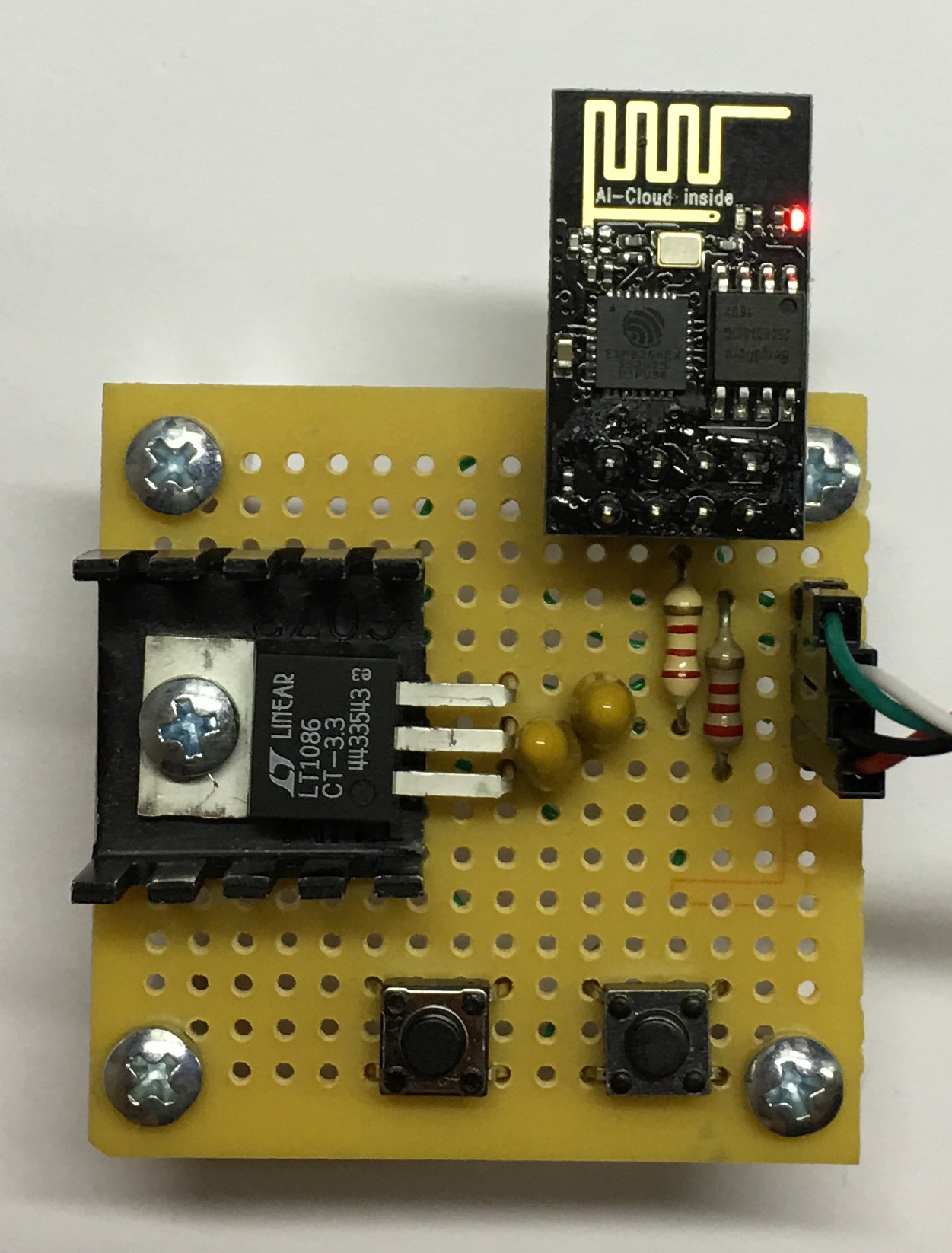
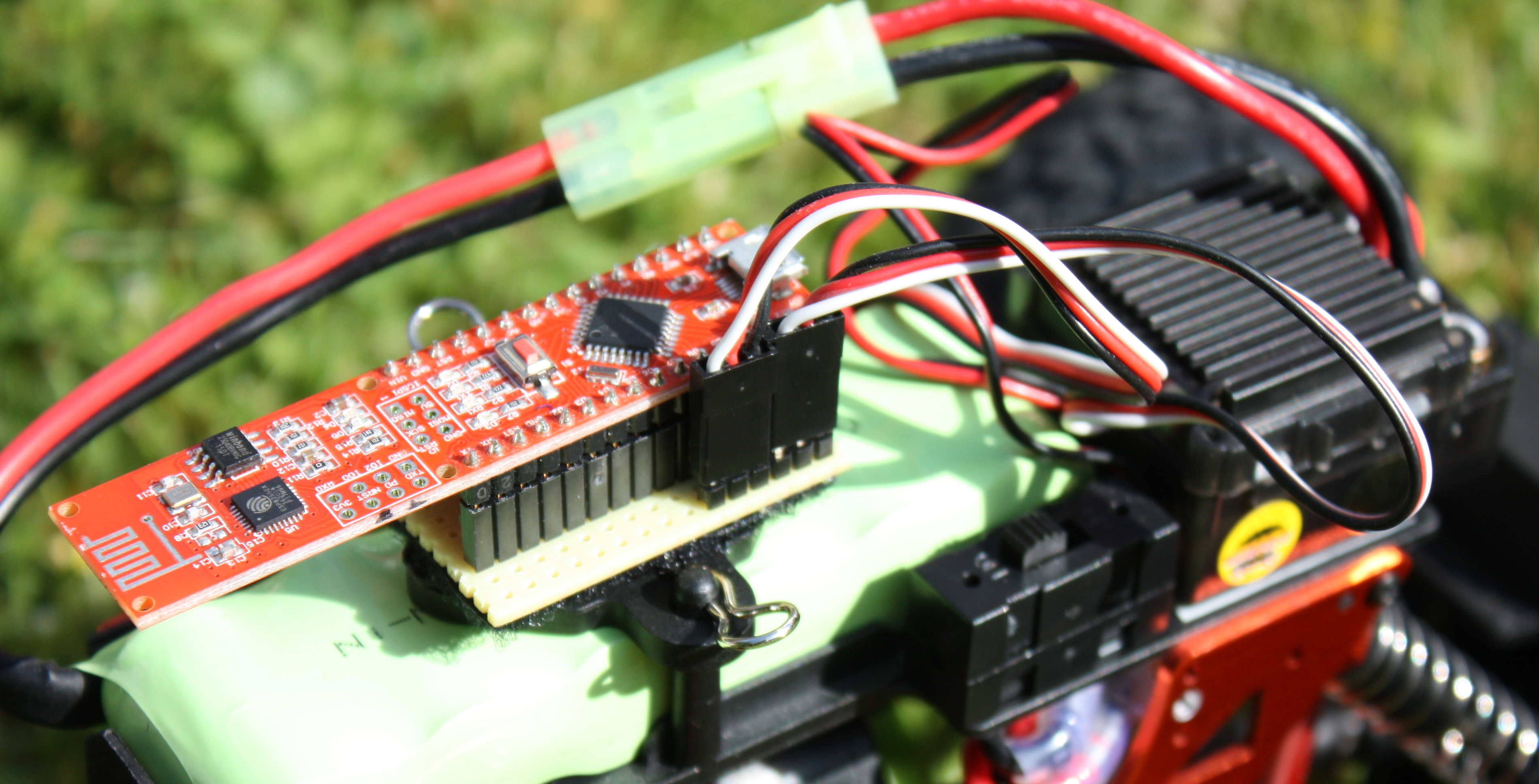
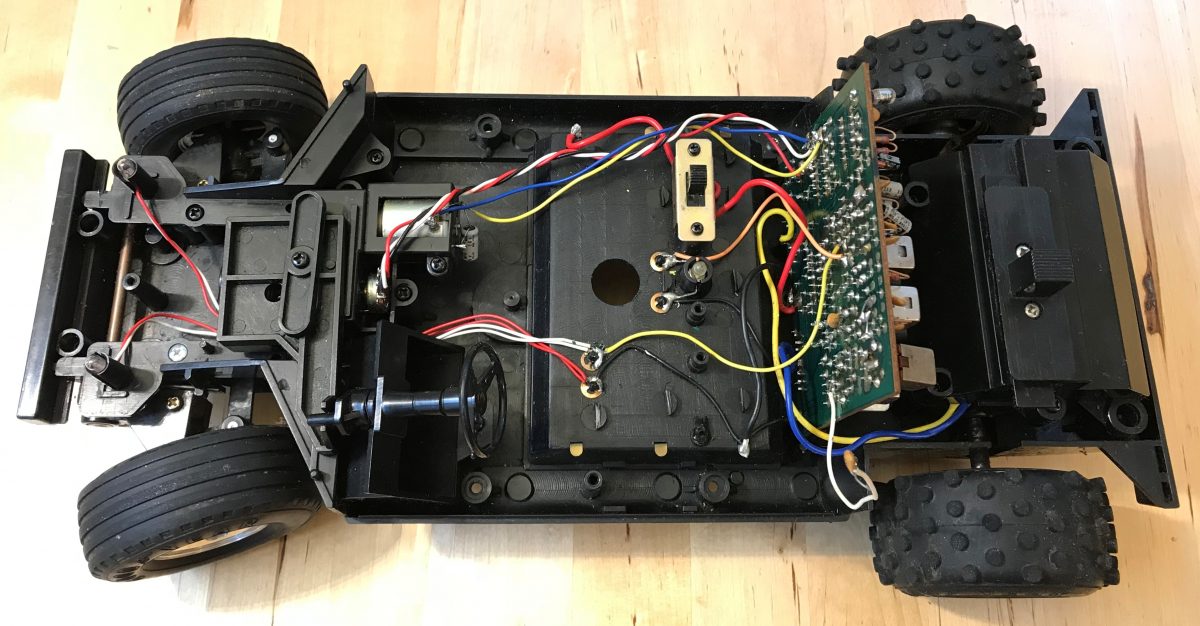
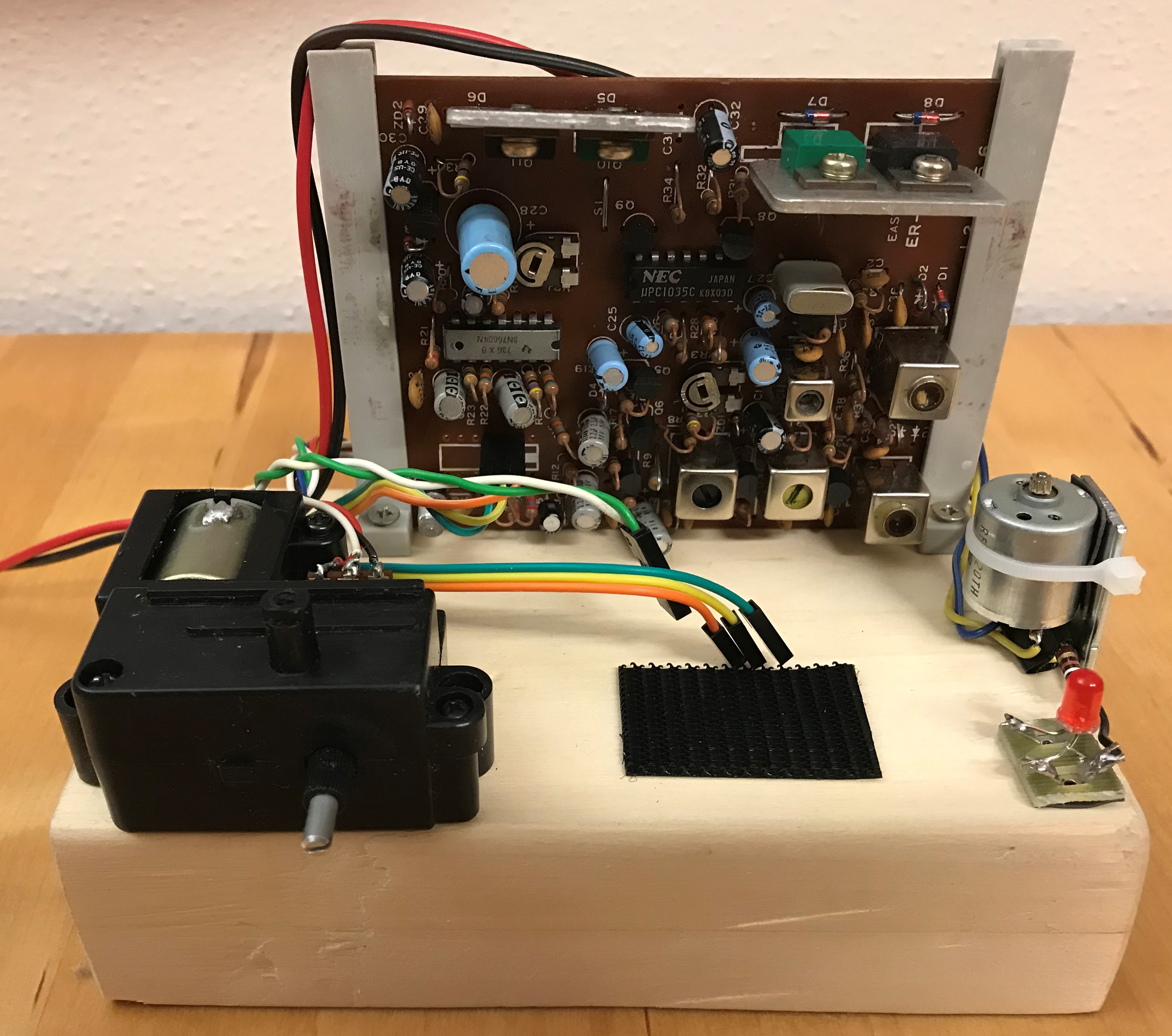
Um die Änderungen testen zu können, habe ich ein einfaches Funktionsmodell des Buggy aufgebaut – das Lenkservo ist original, die Scheinwerfer werden durch eine LED simuliert und ein kleiner Gleichstrommotor ersetzt die originale Motor-/ Getriebeeinheit. Der Fernsteuerempfänger wird mit Klettband befestigt.
Zunächst habe ich dann die erforderlichen Impulslängen ermittelt. Da in der Vergangenheit fast jeder Hersteller seine eigenen spezifischen Impulslängen verwendet hat, empfiehlt sich in jedem Fall eine Überprüfung.
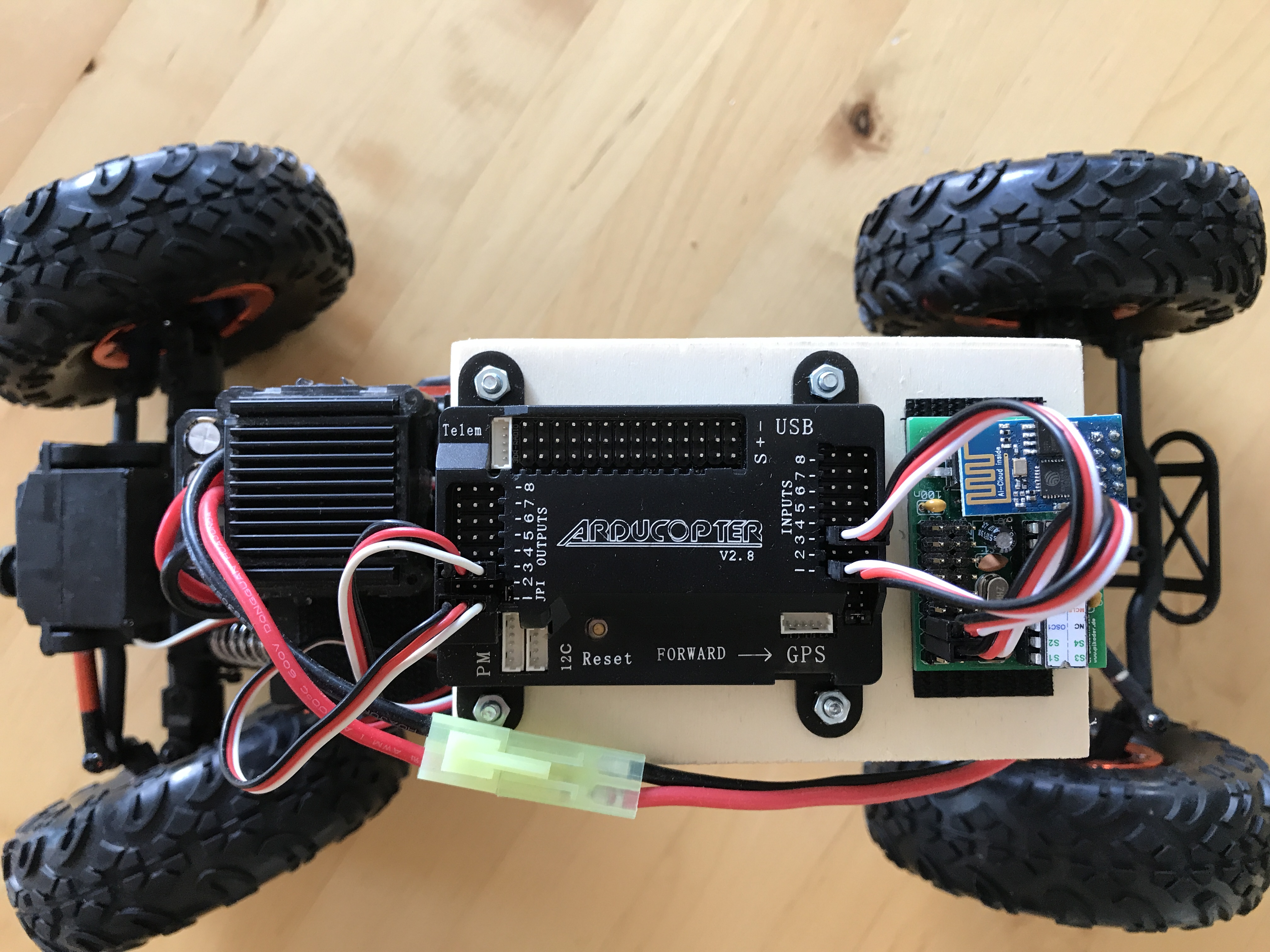
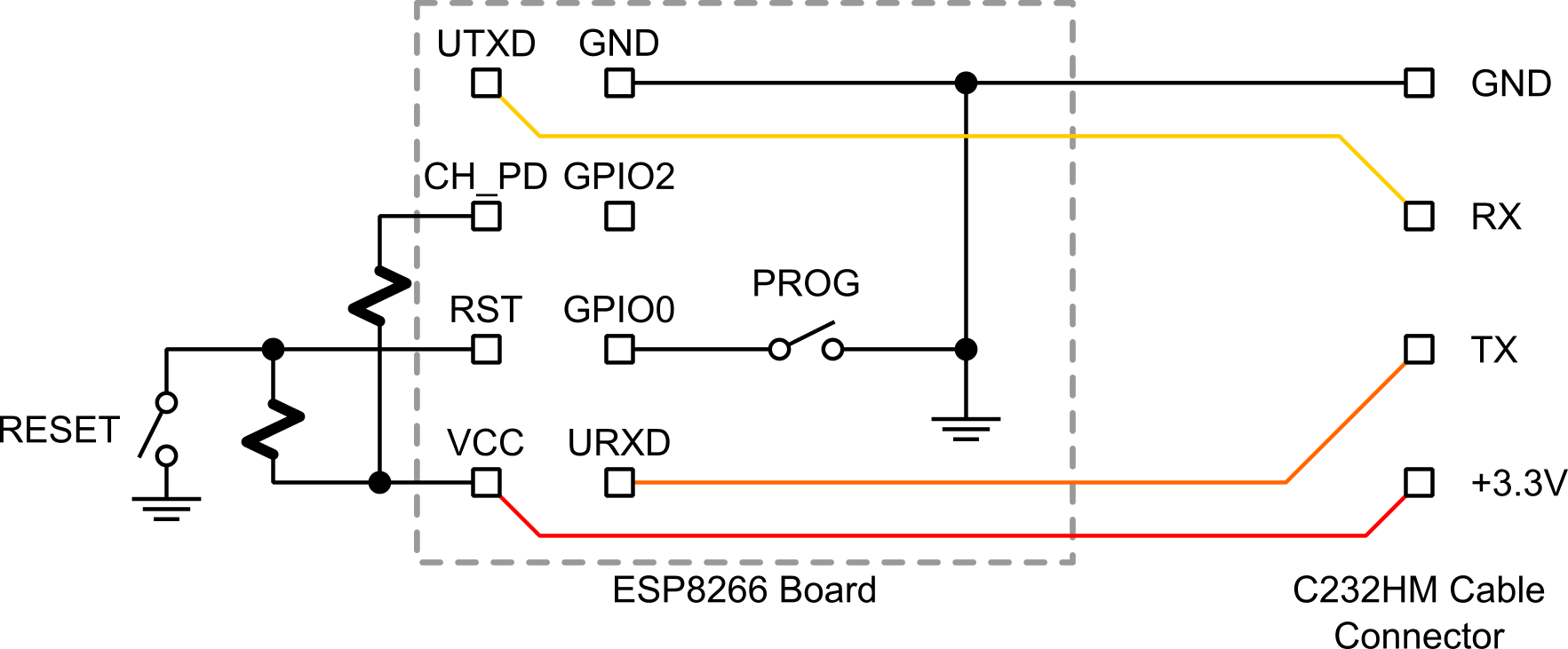
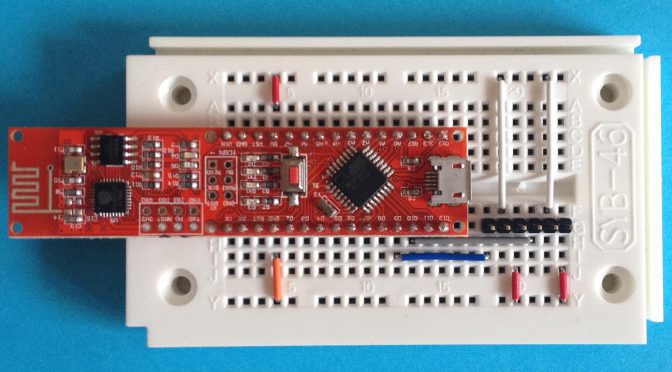
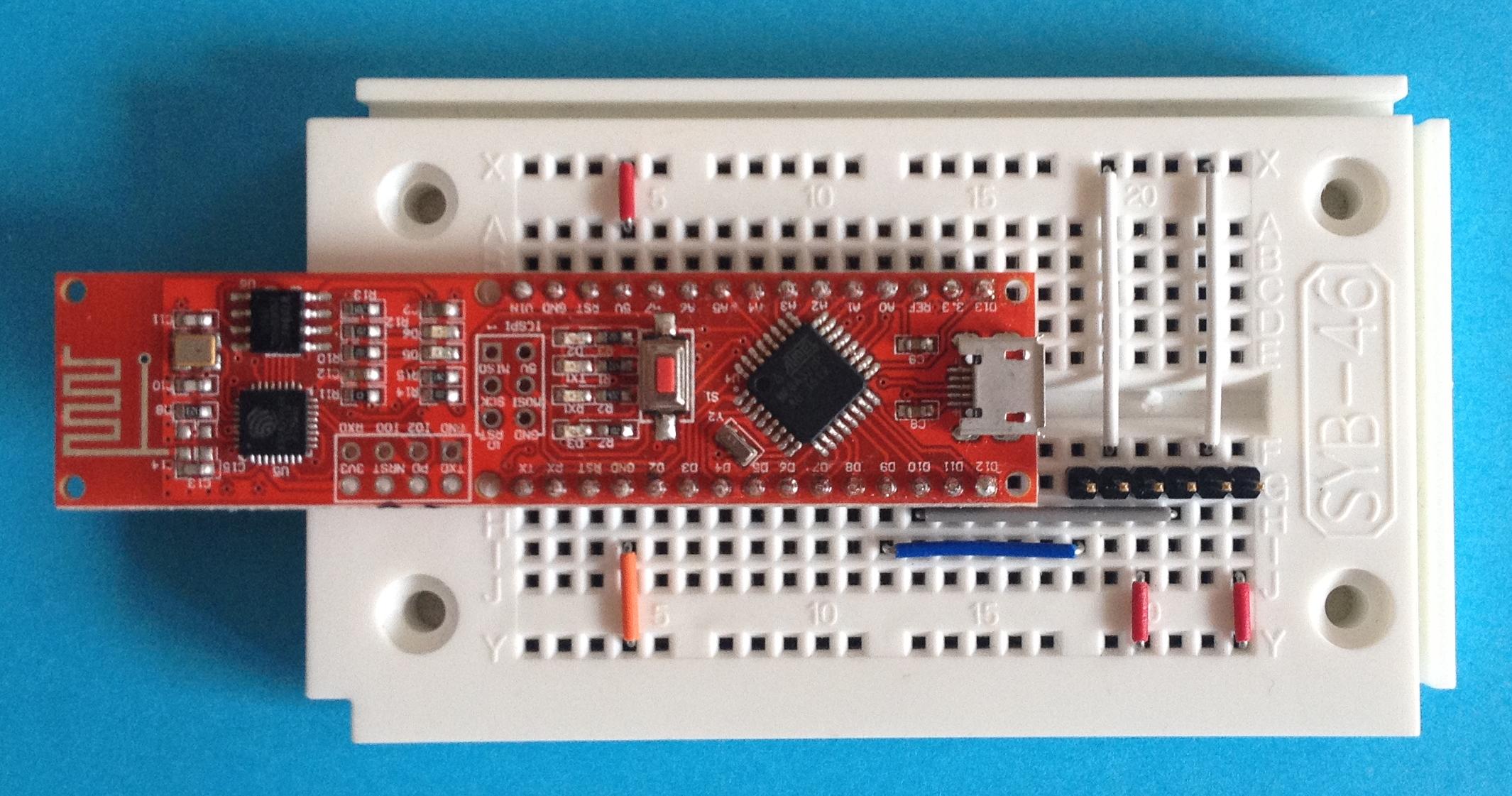
Zur Ermittlung der besten Einstellung habe ich den PiKoder/SSC wRX mit dem Aufbau verbunden und gemäß dem nachfolgenden Bild verdrahtet. (Wichtig: der Empfänger und das rote Kabel sind nicht eingesteckt!)

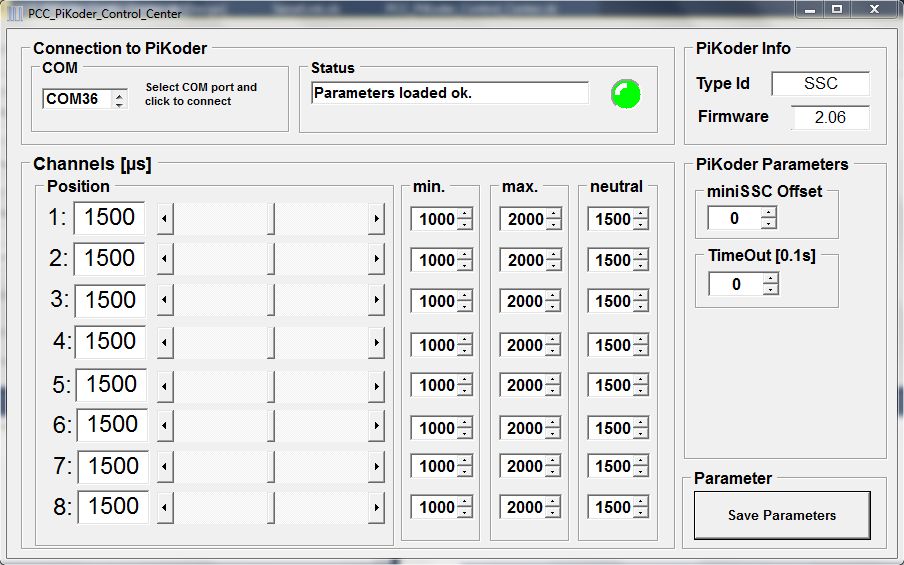
Mit Hilfe des PiKoder Control Centers (PCC) habe ich verschiedene Werte ausprobiert. Die nachfolgenden Einstellungen waren für meinen Aufbau am besten geeignet.
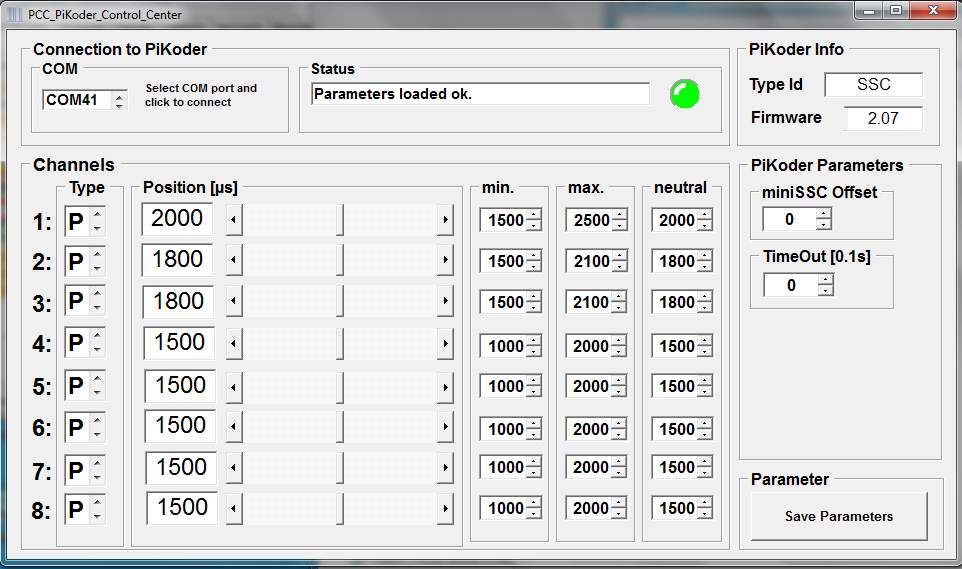
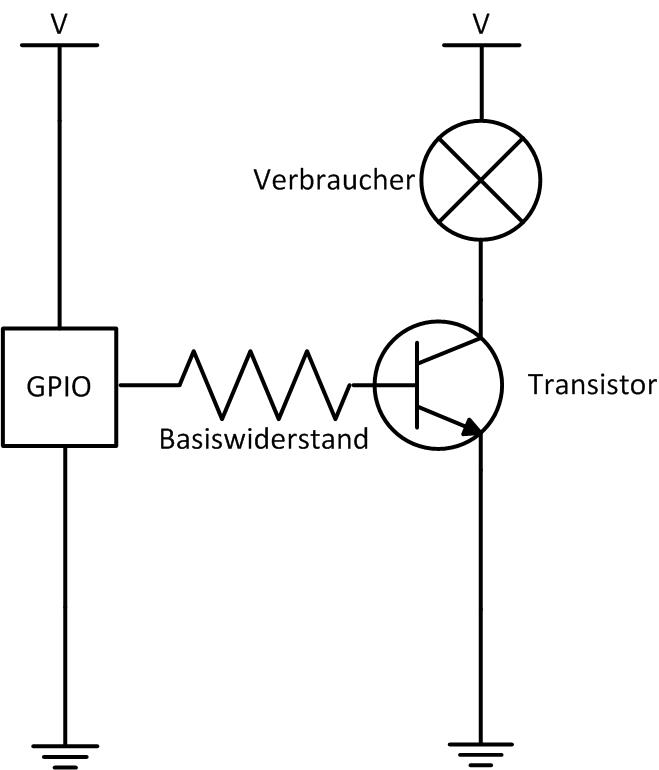
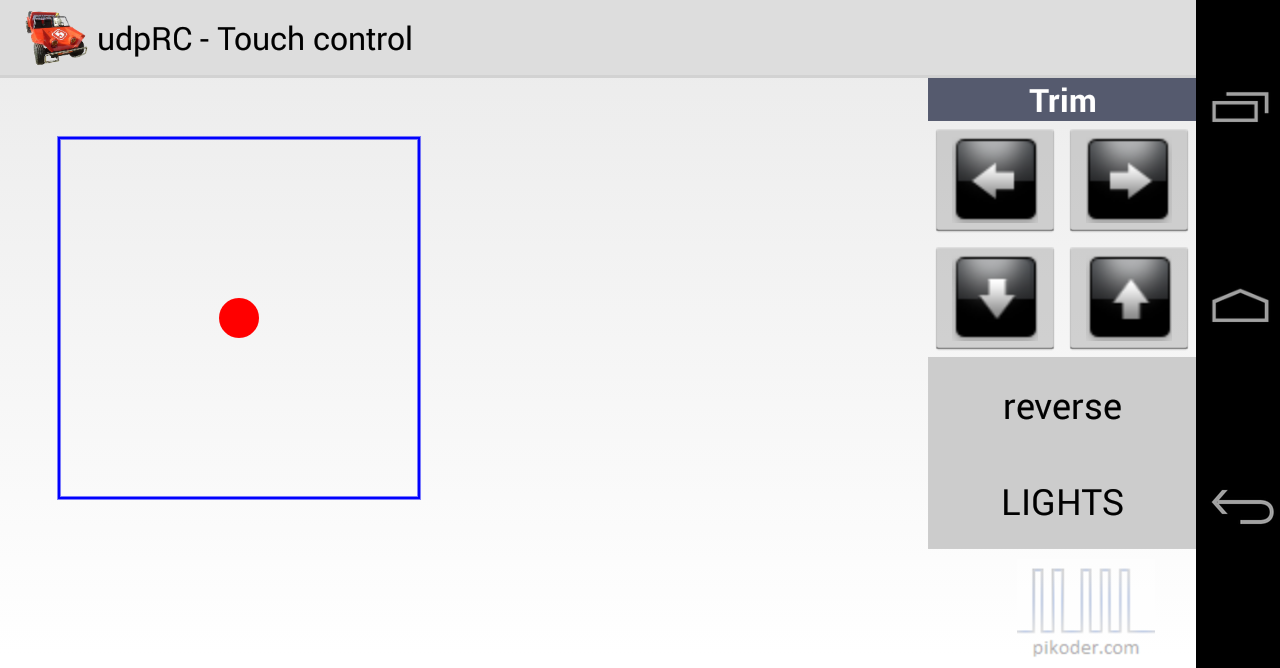
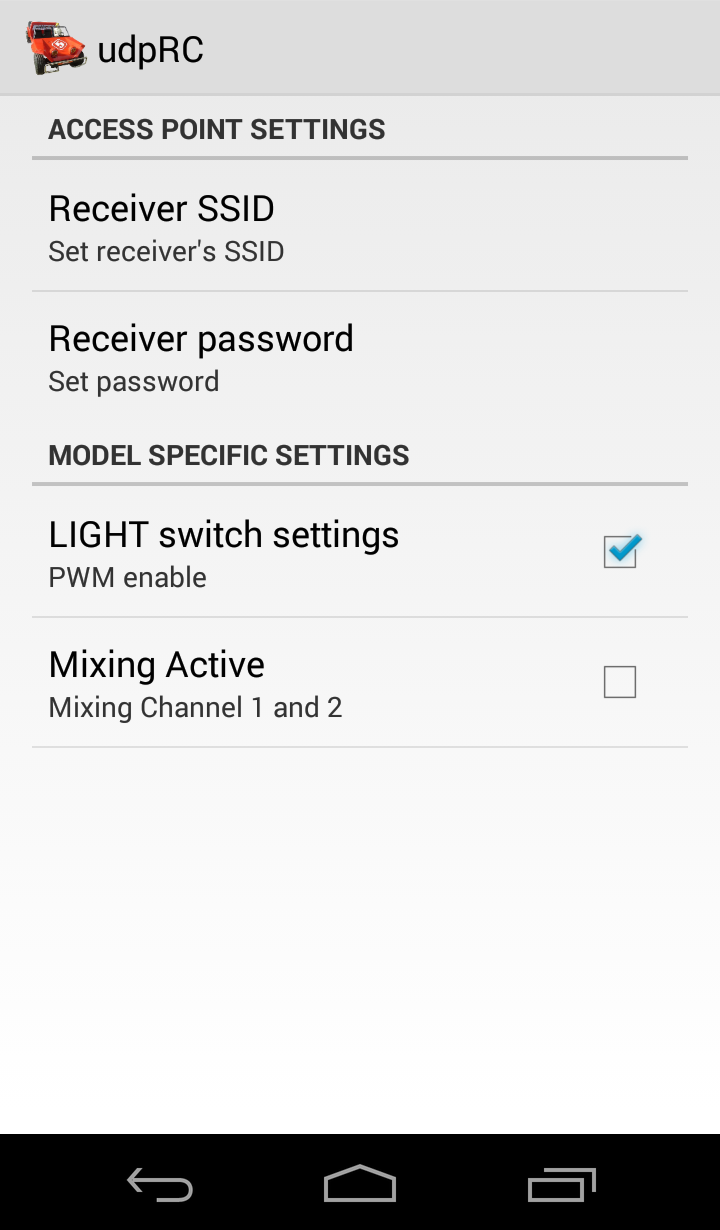
Im Bild sind für die Kanäle 1 und 2 jeweils die Neutralstellung sowie die Minimal- und Maximalwerte gezeigt. Für den Schaltkanal 3 (Scheinwerfer) gibt es keine Neutralposition – ab ca. 1920 µs schaltet das Licht ein. Da die Scheinwerfer nicht über eine Output-Pin geschaltet werden wie bei meiner Umrüstung, sondern über ein PWM-Signal, habe ich eine neue Version 1.11 der udpRC-App erstellt, in der Sie in den App-Settings von der Default-Konfiguration ‚Output-Pin‘ auf PWM umschalten können. Die App ist kostenlos im Play Store erhältlich.
Die ermittelten Werte werden mit ‚Save Parameters‘ im PiKoder abgespeichert, so dass die udpRC-App immer die richtigen Werte vorfindet.