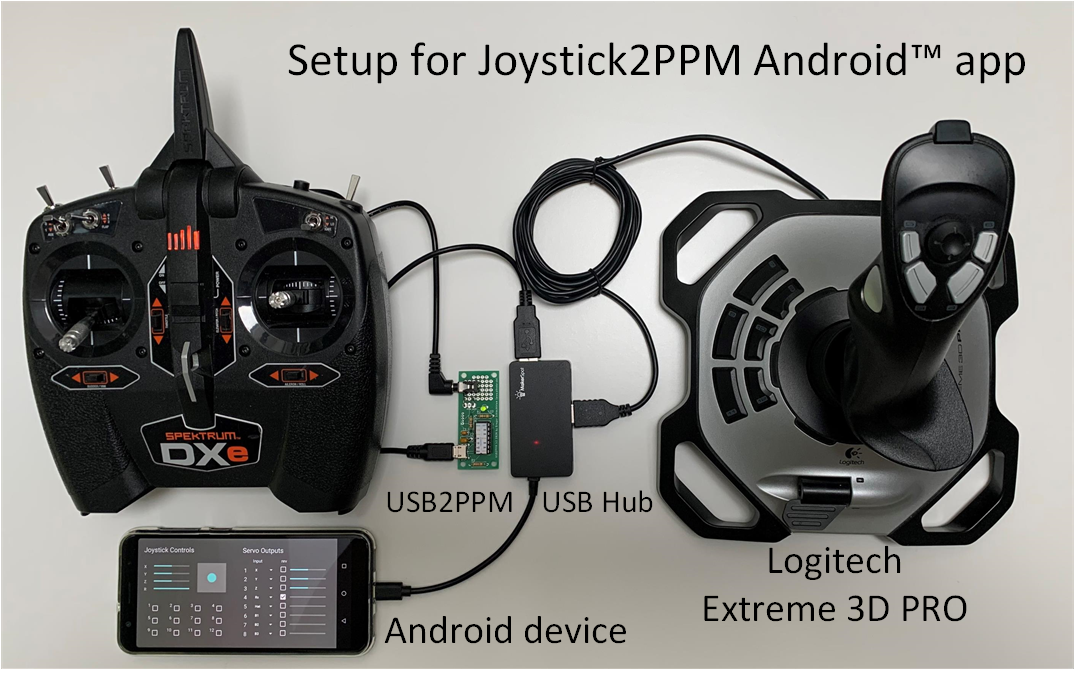
Der erste Beitrag dieser Reihe hat ein Notebook verwendet, um die Joystick-Eingaben in Kommandos für den USB2PPM zu übersetzen. Alternativ hierzu kann für ausgewählte Joysticks auch ein Android(TM) Smart Device mit einer entsprechenden App zum Einsatz kommen.
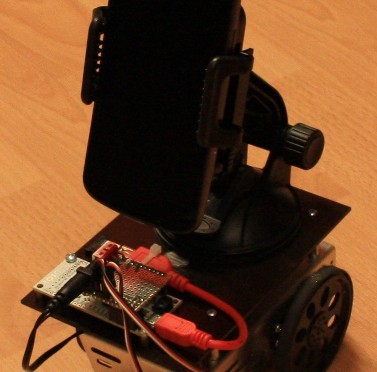
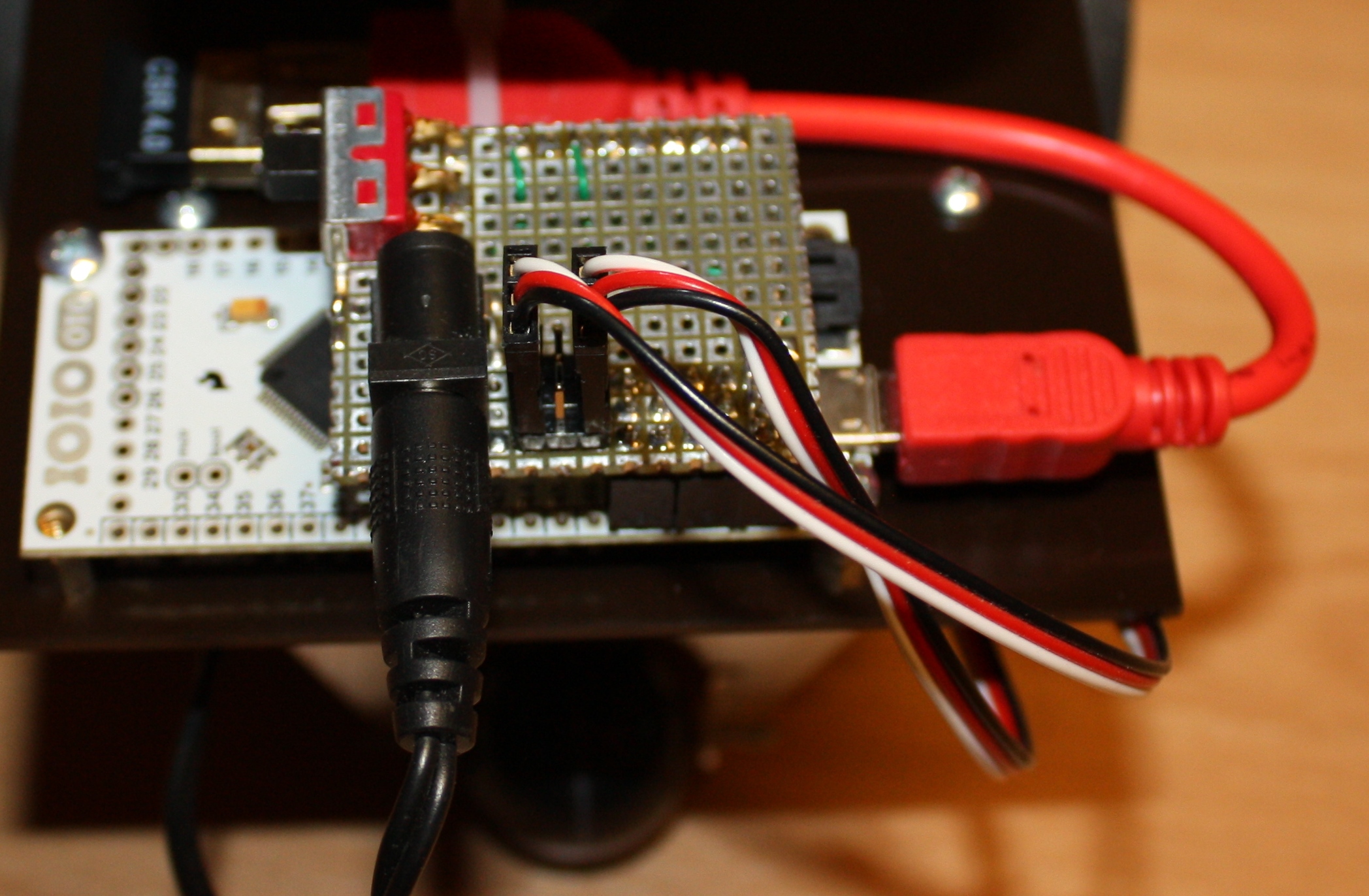
Der Hardwareaufbau im Titelbild gleicht der Konfiguration im Teil 1 bis auf den Computer, der durch das Smart Device ersetzt wird und den Hub: in Verbindung mit dem Smart Device ist unbedingt ein USB OTG Hub zu verwenden.
Hinsichtlich der Vorbereitung des Fernsteuersenders gelten die gleichen Überlegungen zur Ergonomie und es empfiehlt sich, die Fernsteuerung wie in Teil 1 beschrieben, mit einem Schalter zu erweitern.
Hinsichtlich der App selber haben Sie die Auswahl zwischen der kostenlosen App Joystick2PPM und einer speziellen App für Quadrocopter Joystick4UAV (s.u.); beide Apps finden Sie im Google Play Store.
Joystick2PPM (Android App)
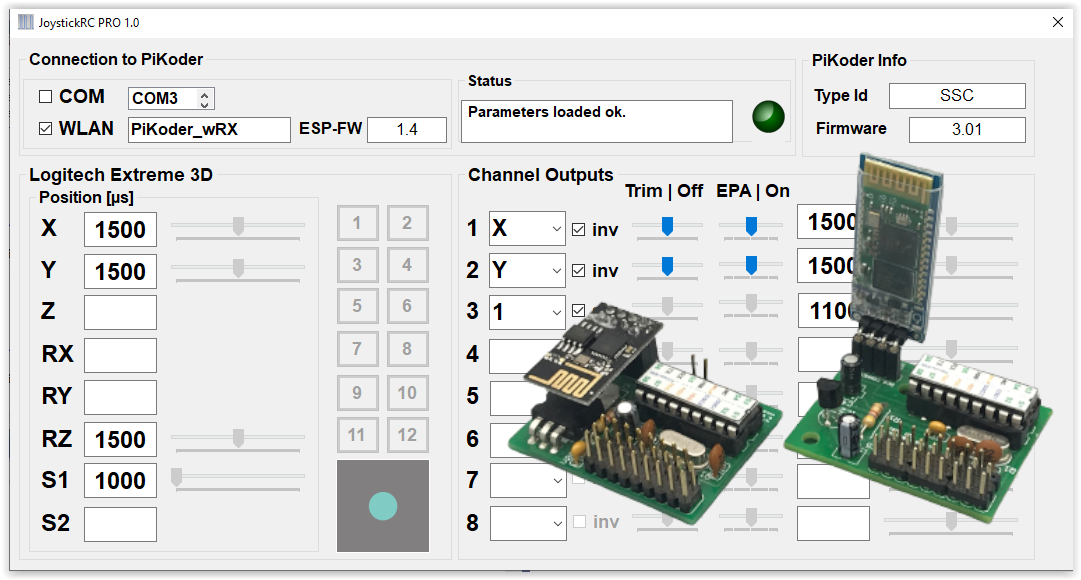
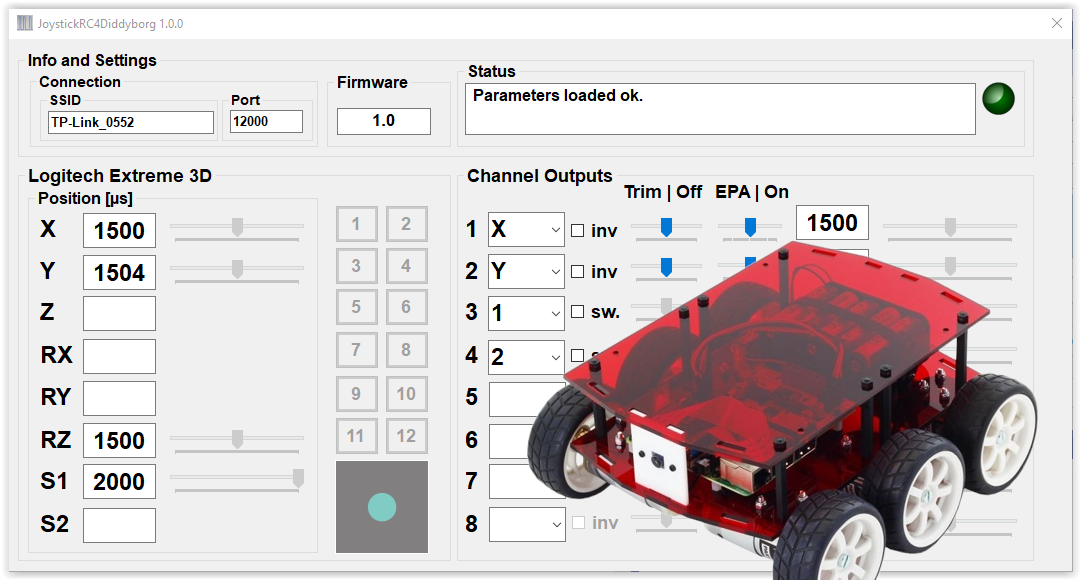
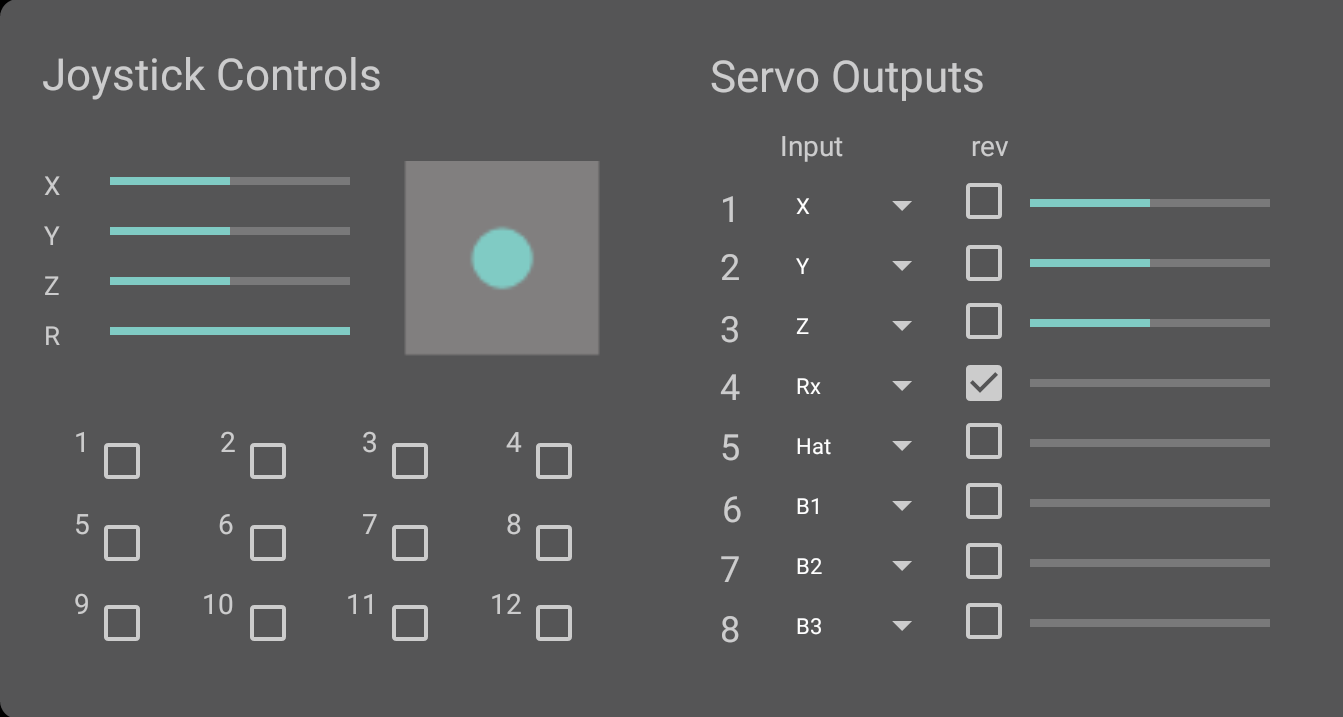
Die Bedieneroberfläche der App entspricht weitgehend der Windows Implementierung und ist intuitiv und einfach verständlich. Auf der linken Seite befinden sich die Joystick – Bedienelemente und die Abbildung auf die Servokanäle erfolgt auf der rechten Seite mit Drop-Down-Boxen.
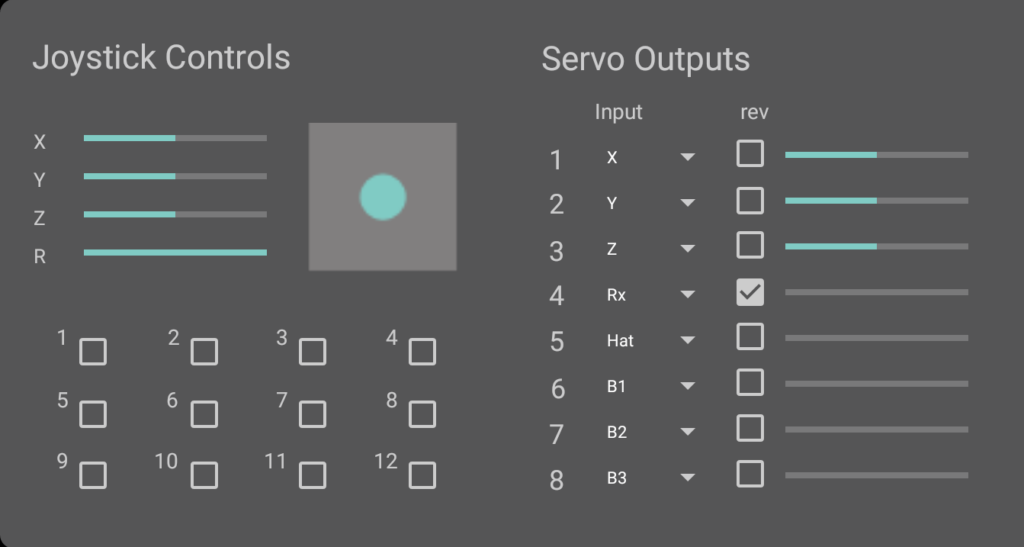
Der Joystick und der USB2PPM werden nach dem Starten der APP automatisch erkannt. Der Benutzer muss beim erstmaligen Gebrauch den Zugriff der Anwendung auf die entsprechenden USB-Schnittstellen freigeben.
Bitte beachten Sie, dass die App derzeit nur eine beschränkte Anzahl von Joysticks und anderen Bediengeräten unterstützt. Den aktuellen Stand der kompatiblen Geräte finden Sie jederzeit im Playstore.
Joystick4UAV (Android App)
Die Joystick4UAV App stellt eine Weiterentwicklung der Joystick2PPM Anwendung dar, die auf die Belange der Fernsteuerung von Quadrocoptern oder anderen Fahrzeugen (UGV) und Booten (USV) mit einem Flight Controller ausgerichtet ist.
Vom grundsätzlichen Aufbau her entspricht die Joystick4UAV den bereits beschriebenen Apps. Die Abbildung der vier Joystick-Achsen erfolgt auf die Fernsteuerkanäle 1-4 entsprechend der üblichen Belegung für Flight Controller. Diese Zuordnung innerhalb der vier Kanäle können Sie natürlich entsprechend Ihrer Präferenzen anpassen. Alle Kanäle können durch Checken der zugehörigen Box invertiert werden.
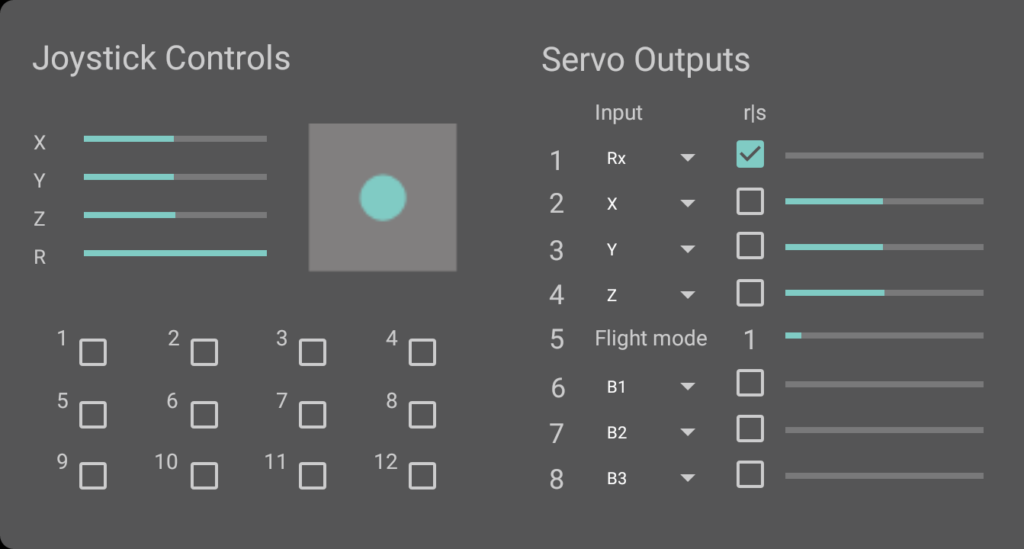
Der Flight Mode wird im Kanal 5 kodiert. Es stehen sechs Modi zur Verfügung. Die Umschaltung erfolgt über die Joystick-Taster 7-12 (s. Bild rechts unten), wobei Taster 7 Flugmode „1“ einstellt und Taster 12 den Flugmode „6“. Der gewählte Flugmode wird jeweils numerisch angezeigt („1“ im Bild oben) und der Balken entspricht dem übertragenen Kanalwert. 
Die verbleibenden Taster 1-6 (Button B1 .. B6 im oberen Bereich) und der Hat-Switch stehen für Sonderfunktionen zur Verfügung und können beliebig den Kanälen 6-8 zugeordnet werden. Wird die zum Kanal gehörige Box aktiviert, dann verhält sich der Taster als Schalter.
Bitte beachten Sie, dass in der App derzeit nur der Logitech Extreme 3D Pro Joystick unterstützt wird.