In this blog I present my Windows app JoystickRC4DiddyBorg for remote control of the DiddyBorg (from PiBorg) with a joystick or gamepad.
The DiddyBorg sample programs published by the manufacturer PiBorg also include a Python remote control script with joystick, but it uses Bluetooth and therefore has a rather limited range.
The app presented here uses the existing WLAN and UDP as protocol to ensure sufficient agility of the remote control. For safety reasons, the time-out logic of the ThunderBorg motor controller is activated.
Software installation
The DiddyBorg needs a Python script JoystickRC4DiddyBorg as receiver, which you can find on github.com. In addition to the receiver program, you will also find a version of the ThunderBorg – Library for Python 3.x in the repository (the sample programs for the DiddyBorg are still based on Python 2.x).
The easiest way is to copy the two files additionally into the directory with the examples – then the script should work without further adjustments of path names.
On the PC side, install the Windows app JoystickRC4DiddyBorg of the same name, which you can get for free from the Microsoft App Store.
Operation
First start the Python script on the DiddyBorg. If you have a screen connected, then the program will log in and indicate that it is waiting for a client.
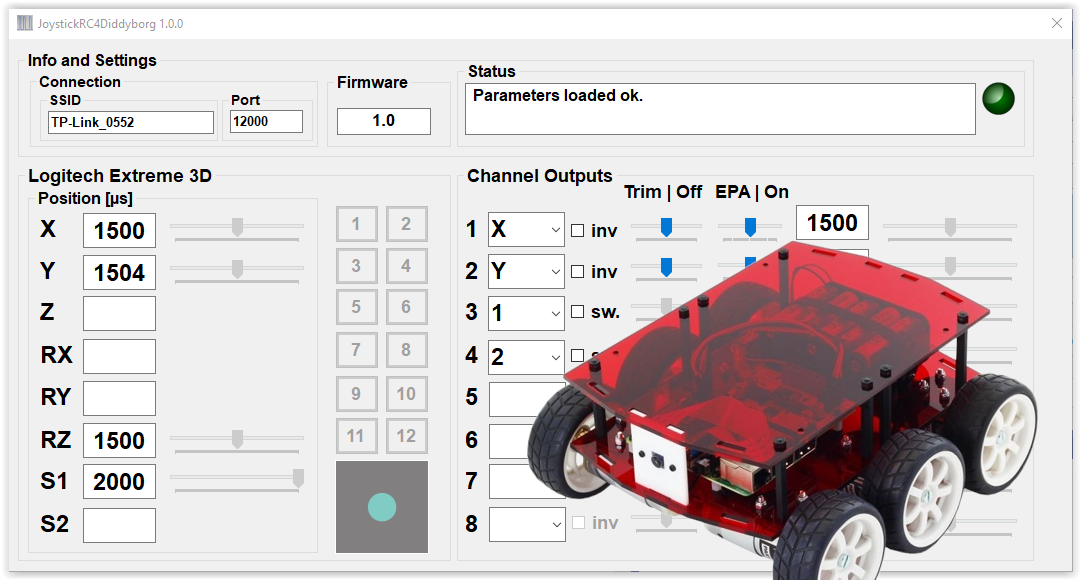
When you start the PC app, it will automatically search for a DiddyBorg with an active and compatible receiver on the local WLAN (to which both the DiddyBorg and the PC being used must be connected). If no connection can be established, a corresponding error message is displayed.
After the connection has been successfully established, the channels can be assigned to the various joystick axes and keys. Channels 3 and 4 are used as push buttons and allow for example fast / slow rotation (the function of the push buttons can be traced in the Python script).
The assignment of the channels is saved and restored at the next program start.