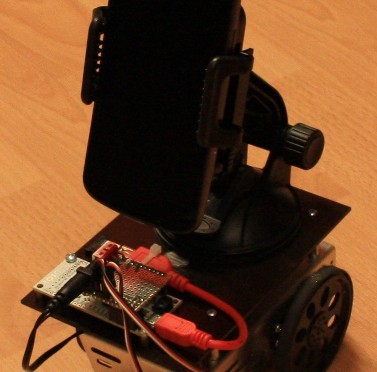
Dieser Beitrag zeigt, wie einfach es ist, ein ferngesteuertes Modellauto – hier einen Crawler – auf eine Fernsteuerung mit dem Smartphone und WLAN umzurüsten. Durch die Verwendung des Pretzelboards als Empfänger beschränkt sich der Hardware-Bauaufwand auf eine Prototyp-Leiterplatte zur elektrischen und mechanischen Adaption des Boardes. Der benötigte Sketch sowie die Android App stehen im Beitrag zum Download bereit.
Aufbau Empfänger
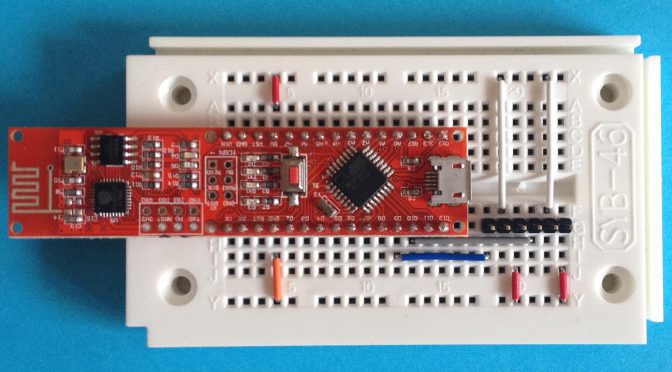
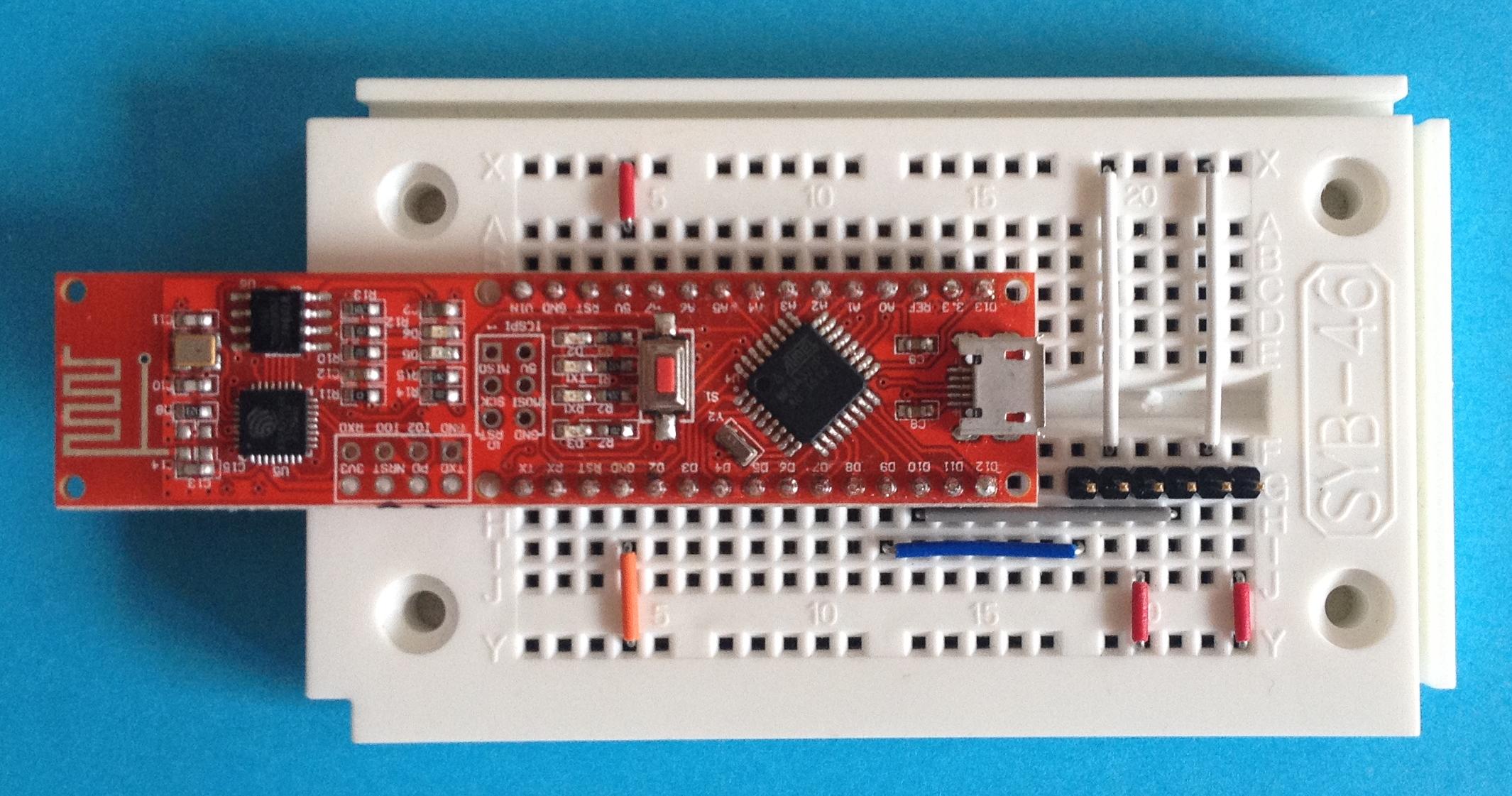
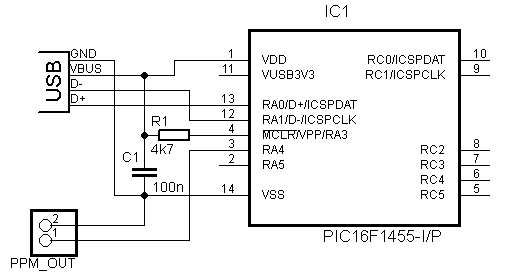
Die Schaltung des Empfängers kann durch den Einsatz des Pretzelboards sehr einfach gehalten werden. Die Spannungsversorgung erfolgt über den Fahrtregler, der normalerweise auch den „traditionellen“ Empfänger mit 5 Volt versorgt (BEC – Battery Elimination Circuit) und ausreichend Leitung bereitstellt.
Achtung: bitte immer sicherheitshalber nachmessen, um eine Zerstörung des Pretzelboardes durch zu hohe Spannung zu vermeiden!
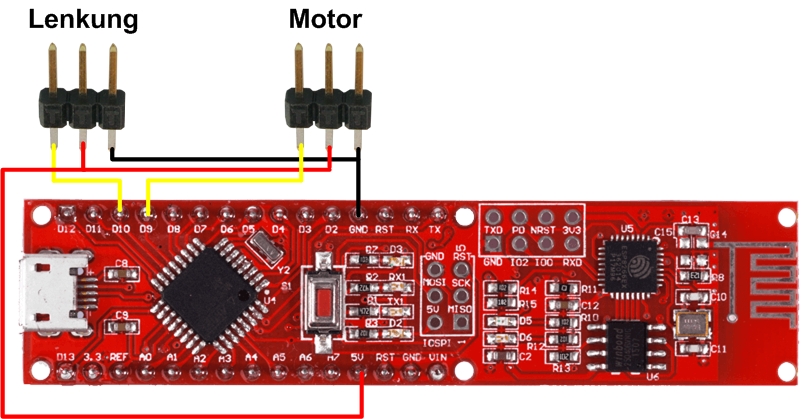
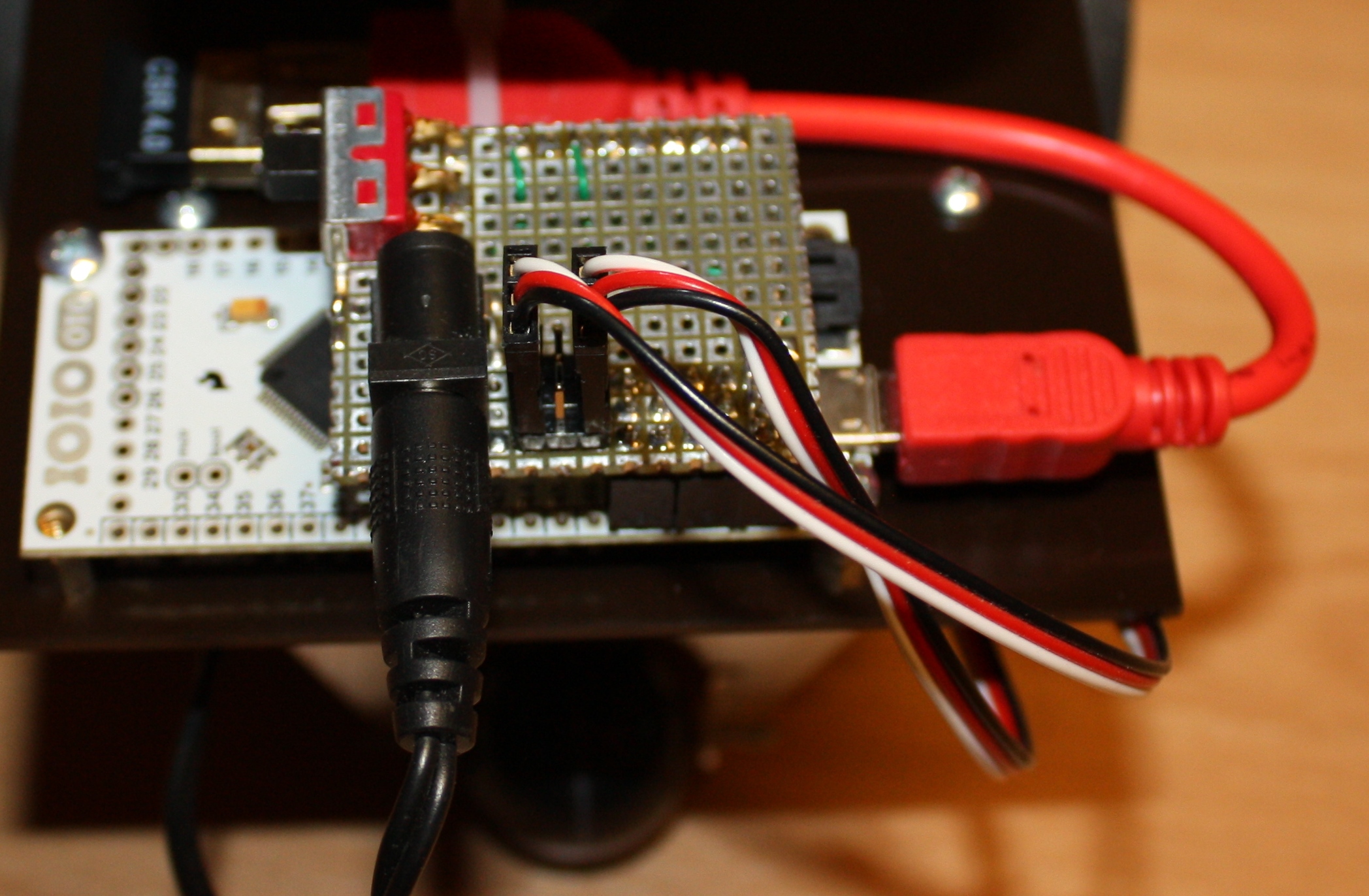
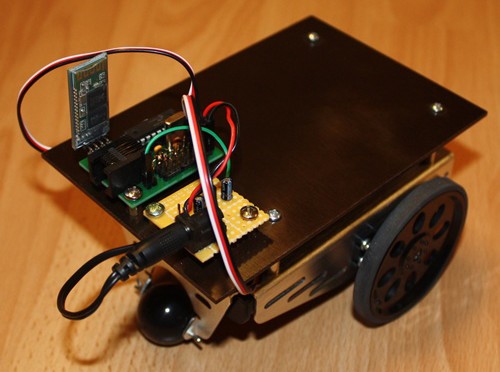
Von daher wird der Empfänger zweckmäßigerweise unter Verwendung einer Lochrasterplatine, die über zwei Buchsenleisten das Pretzelboard aufnimmt und zwei dreipolige Stiftleisten für den Anschluss des Lenkservos und den Fahrtregler (ESC) realisiert.
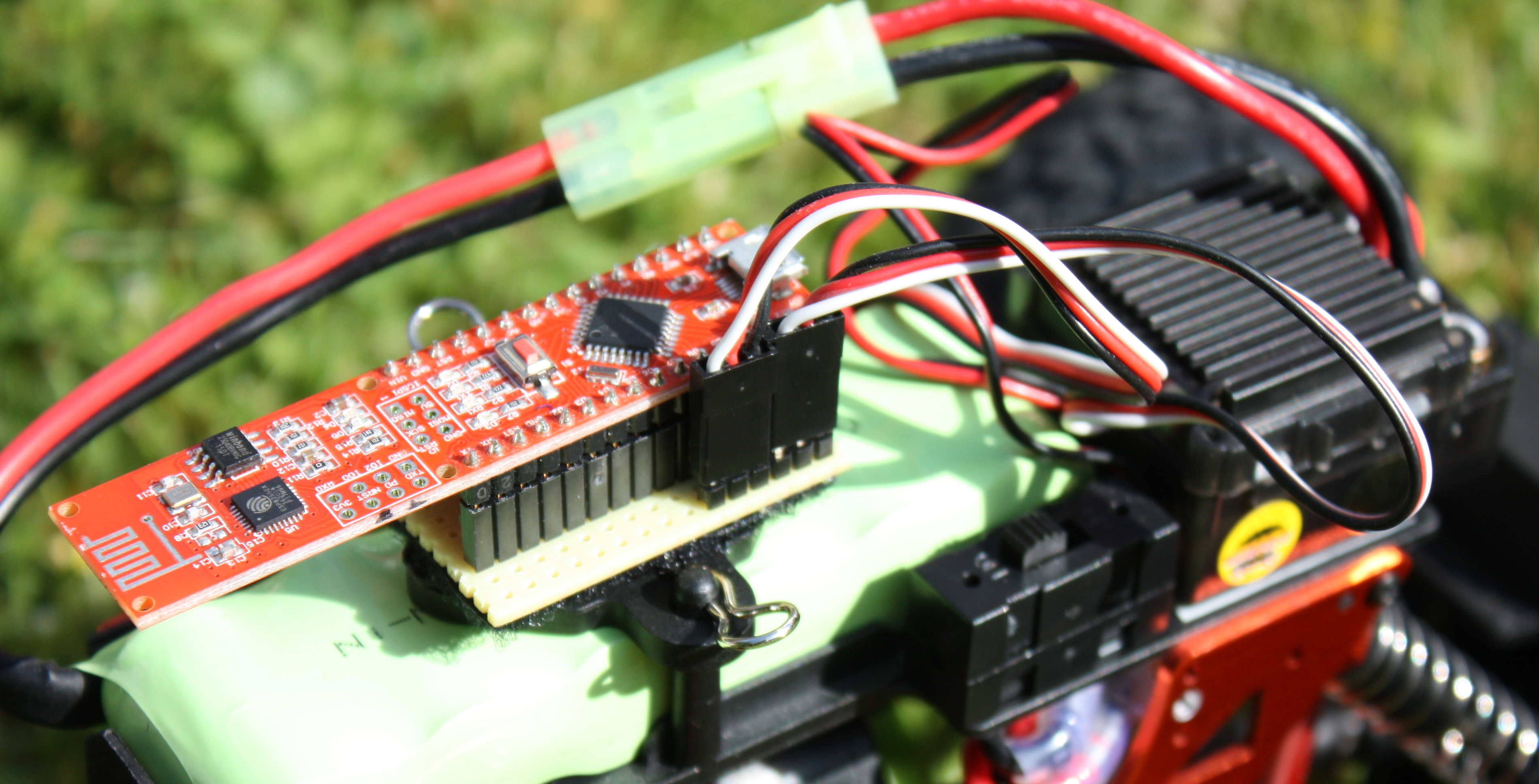
Der Empfänger wird mechanisch mit Klettband an einer geeigneten Stelle im Modell befestigt.
Schließlich ist der Controller Sketch „UDP_RC.ino“ zu laden, der über github bereit gestellt wird.
Installation Android App „udpRC4NanoESP“
Die als Sender benötigte Android App „udpRC4NanoESP“ ist Open Source und kann über github bezogen werden.
Start der Fernsteuerung
Zunächst wird der Empfänger eingeschaltet, der nach dem Booten den Hotspot „NanoESP“ anbietet. Das Android Smartphone ist über die Einstellungen mit diesem Hotspot zu verbinden.
Dann wird die udpRC4NanoESP-App gestartet und die gewünschte Bedieneroberfläche im Hauptmenü ausgewählt….