In this blog I am presenting my Windows-App USB2PPM4CompuFly for the CompuFly USBtoPPM Converter V2.0 by Flytron. This software replaces the CompuFly – programm available on the Flytron web-page.
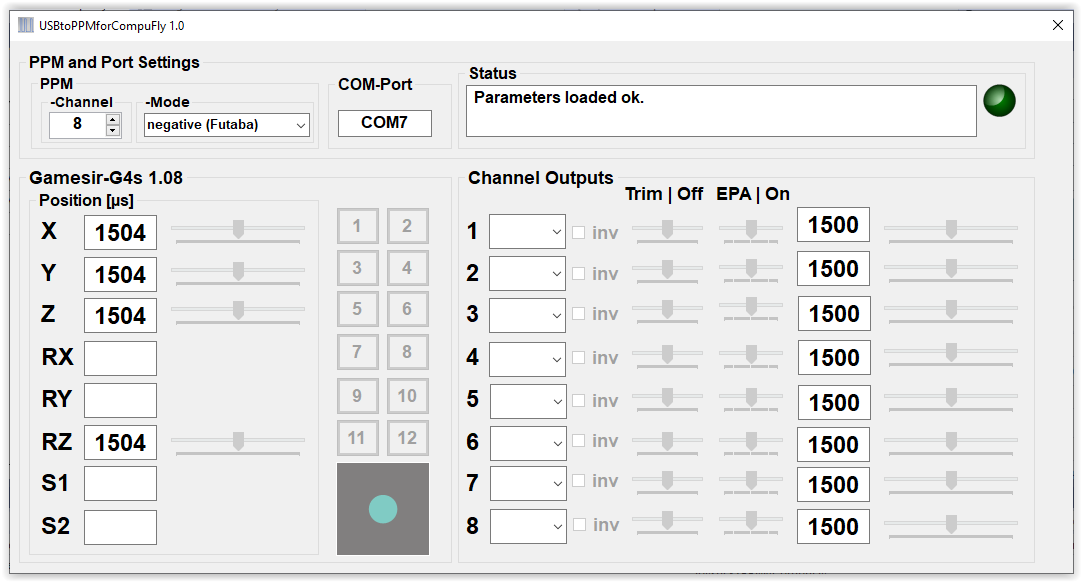
The USBtoPPMforCompuFly-app maintains the proven user interface of the CompuFly-programm to a large extend but presents itself as a completely rewritten Windows 10/11 app with a more modern inerface and new features.
When started the app will automatically connect with the converter and the first DirectX capable Joystick or Gamepad found. Your configuration will be saved and reloaded when restarting.
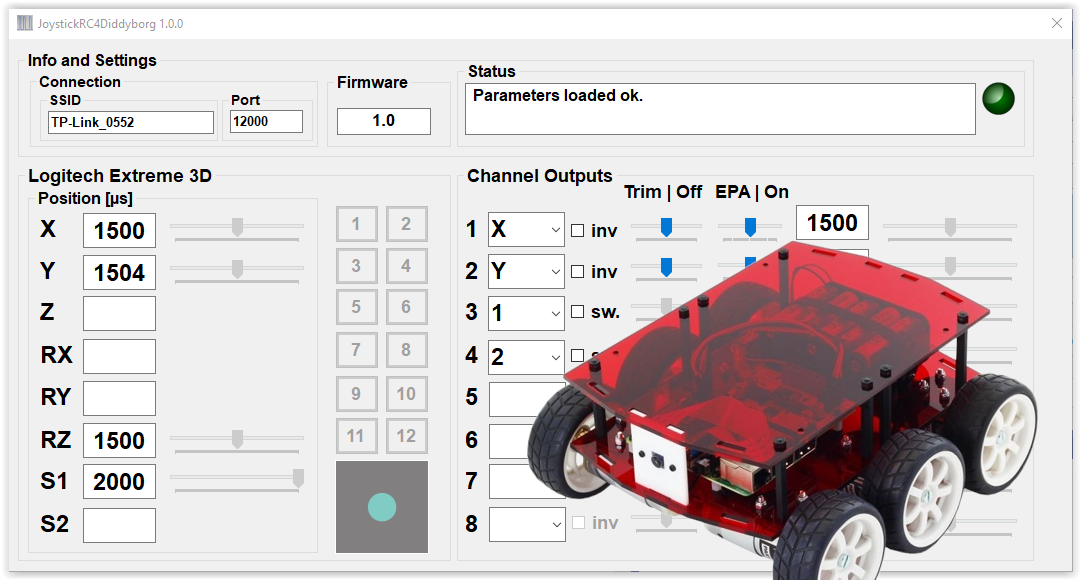
The user interface of the app is intuitive and self-explanatory: simply associate joystick axes, sliders or buttons to channel outputs. In order to accommodate the specifics of your application, channels connected to sliders and axis can be trimmed and the pulse range can be adjusted (EPA).
On top of the feature set of the open source CompuFly.zip version 1.35 buttons can be turned into on/off switches. You would assign a button to an output channel. By checking the “sw” box which replaces the inverse option after you assigning a button to an output channel.
You will find the USBtoPPMforCompuFly app in the Microsoft app store.